Adelson Publications
Rosenholtz Publications
Adelson Publications
| Visual dexterity: In-hand reorientation of novel and complex object shapes</a > T Chen, M Tippur, S Wu, V Kumar, E Adelson, P Agrawal
Science Robotics 8 (84), eadc9244, 2023
|
2023 | |
| GelSight Svelte: A Human Finger-shaped Single-camera Tactile Robot Finger with Large Sensing Coverage and Proprioceptive Sensing</a > J Zhao, EH Adelson
2023 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2023 |
2</a > | 2023 |
| GelSight Svelte Hand: A Three-finger, Two-DoF, Tactile-rich, Low-cost Robot Hand for Dexterous Manipulation</a > J Zhao, EH Adelson
arXiv preprint arXiv:2309.10886, 2023
|
2023 | |
| Optomechanical Method to Measure Arterial Pulse and Assess Cardiopulmonary Hemodynamics</a > EH Adelson, A Biswas, M Thanikachalam
US Patent App. 18/020,332, 2023
|
2023 | |
| Flexible optical tactile sensor</a >
E Adelson, S Liu
US Patent App. 17/665,186, 2023
|
2023 | |
| Retrographic sensors with compact illumination</a >
E Adelson, B Romero, FF Veiga
US Patent 11,703,321, 2023
|
1</a > | 2023 |
| Retrographic sensor cartridge</a >
J Rohaly, MK Johnson, N Lauder, EH Adelson
US Patent App. 29/795,021, 2023
|
2023 | |
| Tactile-Reactive Roller Grasper</a >
S Yuan, S Wang, R Patel, M Tippur, C Yako, E Adelson, K Salisbury
arXiv preprint arXiv:2306.09946, 2023
|
2023 | |
| GelSight360: An Omnidirectional Camera-Based Tactile Sensor for Dexterous Robotic Manipulation</a > MH Tippur, EH Adelson
2023 IEEE International Conference on Soft Robotics (RoboSoft),
1-8, 2023 |
3</a > | 2023 |
| GelSight EndoFlex: A Soft Endoskeleton Hand with Continuous High-Resolution Tactile Sensing</a > SQ Liu, LZ Yañez, EH Adelson
2023 IEEE International Conference on Soft Robotics (RoboSoft),
1-6, 2023 |
7</a > | 2023 |
| GelSight Baby Fin Ray: A Compact, Compliant, Flexible Finger with High-Resolution Tactile Sensing</a > SQ Liu, Y Ma, EH Adelson
2023 IEEE International Conference on Soft Robotics (RoboSoft),
1-8, 2023 |
6</a > | 2023 |
| Tactofind: A tactile only system for object retrieval</a >
S Pai, T Chen, M Tippur, E Adelson, A Gupta, P Agrawal
arXiv preprint arXiv:2303.13482, 2023
|
3</a > | 2023 |
| FingerSLAM: Closed-loop Unknown Object Localization and Reconstruction from Visuo-tactile Feedback</a > J Zhao, M Bauza, EH Adelson
arXiv preprint arXiv:2303.07997, 2023
|
2</a > | 2023 |
| Visuotactile affordances for cloth manipulation with local control</a > N Sunil, S Wang, Y She, E Adelson, AR Garcia
Conference on Robot Learning, 1596-1606, 2023</span >
|
10</a > | 2023 |
| See, hear, and feel: Smart sensory fusion for robotic manipulation</a > H Li, Y Zhang, J Zhu, S Wang, MA Lee, H Xu, E Adelson, L Fei-Fei, R
Gao, … arXiv preprint arXiv:2212.03858, 2022
|
13</a > | 2022 |
| Visual dexterity: In-hand dexterous manipulation from depth</a >
T Chen, M Tippur, S Wu, V Kumar, E Adelson, P Agrawal
arXiv preprint arXiv:2211.11744, 2022
|
30</a > | 2022 |
| Surface topography measurement systems</a >
J Rohaly, EH Adelson
US Patent App. 17/855,710, 2022
|
2022 | |
| Surface topography measurement systems</a >
J Rohaly, EH Adelson
|
2022 | |
| Gelsight fin ray: Incorporating tactile sensing into a soft compliant robotic gripper</a > SQ Liu, EH Adelson
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft),
925-931, 2022 |
23</a > | 2022 |
| Cable manipulation with a tactile-reactive gripper</a >
Y She, S Wang, S Dong, N Sunil, A Rodriguez, E Adelson
The International Journal of Robotics Research 40 (12-14),
1385-1401, 2021 |
194</a > | 2021 |
| Surface topography measurement systems</a >
J Rohaly, EH Adelson
US Patent App. 17/321,868, 2021
|
2021 | |
| Retrographic sensors</a >
EH Adelson, FR Cottrell
US Patent App. 17/193,175, 2021
|
2</a > | 2021 |
| Gelsight wedge: Measuring high-resolution 3d contact geometry with a compact robot finger</a > S Wang, Y She, B Romero, E Adelson
2021 IEEE International Conference on Robotics and Automation
(ICRA), 6468-6475, 2021 |
53</a > | 2021 |
| Tactile blood pressure imager</a >
MA Srinivasan, M Thanikachalam, EH Adelson, A Biswas
US Patent App. 17/044,321, 2021
|
2021 | |
| Surface topography measurement systems</a >
J Rohaly, EH Adelson
US Patent 10,965,854, 2021
|
1</a > | 2021 |
| Digger finger: Gelsight tactile sensor for object identification inside granular media</a > R Patel, R Ouyang, B Romero, E Adelson
Experimental Robotics: The 17th International Symposium,
105-115, 2021 |
16</a > | 2021 |
| Swingbot: Learning physical features from in-hand tactile exploration for dynamic swing-up manipulation</a > C Wang, S Wang, B Romero, F Veiga, E Adelson
2020 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2020 |
78</a > | 2020 |
| Exoskeleton-covered soft finger with vision-based proprioception and tactile sensing</a > Y She, SQ Liu, P Yu, E Adelson
2020 ieee international conference on robotics and automation
(icra), 10075 …, 2020 |
45</a > | 2020 |
| Soft, round, high resolution tactile fingertip sensors for dexterous robotic manipulation</a > B Romero, F Veiga, E Adelson
2020 IEEE International Conference on Robotics and Automation
(ICRA), 4796-4802, 2020 |
60</a > | 2020 |
| Continuous contact-based three-dimensional measurement</a >
EH Adelson, MK Johnson, J Rohaly
US Patent 10,574,944, 2020
|
6</a > | 2020 |
| Design of a fully actuated robotic hand with multiple gelsight tactile sensors</a > A Wilson, S Wang, B Romero, E Adelson
arXiv preprint arXiv:2002.02474, 2020
|
24</a > | 2020 |
| Surface topography measurement systems</a >
J Rohaly, EH Adelson
US Patent App. 16/491,032, 2020
|
3</a > | 2020 |
| Exoskeleton-covered soft finger with vision-based proprioception and exteroception</a > Y She, SQ Liu, P Yu, E Adelson
arXiv preprint arXiv:1910.01287 4, 2019
|
5</a > | 2019 |
| End-to-end pixelwise surface normal estimation with convolutional neural networks and shape reconstruction using GelSight sensor</a > J Li, S Dong, EH Adelson
2018 IEEE International Conference on Robotics and Biomimetics
(ROBIO), 1292 …, 2018 |
16</a > | 2018 |
| Robust plant phenotyping via model-based optimization</a >
P Sodhi, H Sun, B Póczos, D Wettergreen
2018 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2018 |
7</a > | 2018 |
| 3d shape perception from monocular vision, touch, and shape priors</a > S Wang, J Wu, X Sun, W Yuan, WT Freeman, JB Tenenbaum, EH Adelson
2018 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2018 |
91</a > | 2018 |
| Gelslim: A high-resolution, compact, robust, and calibrated tactile-sensing finger</a > E Donlon, S Dong, M Liu, J Li, E Adelson, A Rodriguez
2018 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2018 |
238</a > | 2018 |
| More than a feeling: Learning to grasp and regrasp using vision and touch</a > R Calandra, A Owens, D Jayaraman, J Lin, W Yuan, J Malik, EH
Adelson, … IEEE Robotics and Automation Letters 3 (4), 3300-3307, 2018</span >
|
313</a > | 2018 |
| Slip detection with combined tactile and visual information</a >
J Li, S Dong, E Adelson
2018 IEEE International Conference on Robotics and Automation
(ICRA), 7772-7777, 2018 |
127</a > | 2018 |
| Vitac: Feature sharing between vision and tactile sensing for cloth texture recognition</a > S Luo, W Yuan, E Adelson, AG Cohn, R Fuentes
2018 IEEE International Conference on Robotics and Automation
(ICRA), 2722-2727, 2018 |
115</a > | 2018 |
| Active clothing material perception using tactile sensing and deep learning</a > W Yuan, Y Mo, S Wang, EH Adelson
2018 IEEE International Conference on Robotics and Automation
(ICRA), 4842-4849, 2018 |
115</a > | 2018 |
| Road-segmentation-based curb detection method for self-driving via a 3D-LiDAR sensor</a > Y Zhang, J Wang, X Wang, JM Dolan
IEEE transactions on intelligent transportation systems 19 (12),
3981-3991, 2018 |
146</a > | 2018 |
| Cloth texture recognition using vision and tactile sensing</a >
S Luo, W Yuan, E Adelson, AG Cohn, R Fuentes
ICRA 2018 workshop: Active touch for perception and interaction: how
nature …, 2018 |
3</a > | 2018 |
| Gelsight: High-resolution robot tactile sensors for estimating geometry and force</a > W Yuan, S Dong, EH Adelson
Sensors 17 (12), 2762, 2017
|
681</a > | 2017 |
| The feeling of success: Does touch sensing help predict grasp outcomes?</a > R Calandra, A Owens, M Upadhyaya, W Yuan, J Lin, EH Adelson, …
arXiv preprint arXiv:1710.05512, 2017
|
181</a > | 2017 |
| Improved gelsight tactile sensor for measuring geometry and slip</a >
S Dong, W Yuan, EH Adelson
2017 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2017 |
200</a > | 2017 |
| Tracking objects with point clouds from vision and touch</a >
G Izatt, G Mirano, E Adelson, R Tedrake
2017 IEEE International Conference on Robotics and Automation
(ICRA), 4000-4007, 2017 |
78</a > | 2017 |
| Shape-independent hardness estimation using deep learning and a gelsight tactile sensor</a > W Yuan, C Zhu, A Owens, MA Srinivasan, EH Adelson
2017 IEEE International Conference on Robotics and Automation
(ICRA), 951-958, 2017 |
164</a > | 2017 |
| Visual wetness perception based on image color statistics</a >
M Sawayama, EH Adelson, S Nishida
Journal of vision 17 (5), 7-7, 2017
|
47</a > | 2017 |
| High-resolution surface measurement systems and methods</a >
EH Adelson, MK Johnson
US Patent 9,538,056, 2017
|
5</a > | 2017 |
| Development of GelSight: A High-resolution Tactile Sensor for Measuring Geometry and Force</a > W Yuan, S Dong, EH Adelson
|
2017 | |
| Connecting look and feel: Associating the visual and tactile properties of physical materials</a > W Yuan, S Wang, S Dong, E Adelson
Proceedings of the IEEE Conference on Computer Vision and
Pattern …, 2017 |
109</a > | 2017 |
| Motion, Early Vision, and the Plenoptic Function</a >
EH Adelson
Frontiers in Optics, FTh4I. 3, 2016
|
2016 | |
| Estimating object hardness with a gelsight touch sensor</a >
W Yuan, MA Srinivasan, EH Adelson
2016 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2016 |
76</a > | 2016 |
| Can you see what you feel? Color and folding properties affect visual–tactile material discrimination of fabrics</a > B Xiao, W Bi, X Jia, H Wei, EH Adelson
Journal of vision 16 (3), 34-34, 2016
|
55</a > | 2016 |
| Can you see what you feel? Color and folding properties affect visual–tactile material discrimination of fabrics</a > EH Adelson, B Xiao, W Bi, X Jia, H Wei
American University, 2016
|
2016 | |
| Geometric Mechanics for Continuous Swimmers on Granular Material</a >
J Dai, H Faraji, P Schiebel, C Gong, M Travers, R Hatton, D Goldman,
… APS March Meeting Abstracts 2016, V40. 004, 2016</span >
|
2016 | |
| Visually indicated sounds</a >
A Owens, P Isola, J McDermott, A Torralba, EH Adelson, WT Freeman
Proceedings of the IEEE conference on computer vision and
pattern …, 2016 |
410</a > | 2016 |
| Learning visual groups from co-occurrences in space and time</a >
P Isola, D Zoran, D Krishnan, EH Adelson
arXiv preprint arXiv:1511.06811, 2015
|
129</a > | 2015 |
| Band-sifting decomposition for image-based material editing</a >
I Boyadzhiev, K Bala, S Paris, E Adelson
ACM Transactions on Graphics (TOG) 34 (5), 1-16, 2015</span >
|
61</a > | 2015 |
| Talk abstract: Computational lighting design and band-sifting operators</a > S Paris, I Boyadzhiev, K Bala, EH Adelson
2015 IEEE International Conference on Image Processing (ICIP),
36-37, 2015 |
2015 | |
| High-resolution surface measurement systems and methods</a >
EH Adelson, MK Johnson
US Patent 9,127,938, 2015
|
17</a > | 2015 |
| Modifying material appearance with bandsifting operators</a >
E Adelson, I Boyadzhiev, S Paris, K Bala
PERCEPTION 44, 85-85, 2015
|
2015 | |
| Tactile sensor using elastomeric imaging</a >
E Adelson
US Patent App. 14/045,594, 2015
|
1</a > | 2015 |
| Tactile sensor using elastomeric imaging</a >
E Adelson
US Patent App. 14/045,668, 2015
|
1</a > | 2015 |
| Measurement of shear and slip with a GelSight tactile sensor</a >
W Yuan, R Li, MA Srinivasan, EH Adelson
2015 IEEE International Conference on Robotics and Automation
(ICRA), 304-311, 2015 |
251</a > | 2015 |
| Technical Perspective Image Processing Goes Back to Basics</a >
E Adelson
COMMUNICATIONS OF THE ACM 58 (3), 80-80, 2015</span >
|
2015 | |
| Image processing goes back to basics: technical perspective</a >
E Adelson
Communications of the ACM 58 (3), 80-80, 2015</span >
|
2015 | |
| Discovering states and transformations in image collections</a >
P Isola, JJ Lim, EH Adelson
Proceedings of the IEEE conference on computer vision and
pattern …, 2015 |
215</a > | 2015 |
| On the appearance of translucent edges</a >
I Gkioulekas, B Walter, EH Adelson, K Bala, T Zickler
Proceedings of the ieee conference on computer vision and
pattern …, 2015 |
40</a > | 2015 |
| Sparklevision: Seeing the world through random specular microfacets</a > Z Zhang, P Isola, EH Adelson
Proceedings of the IEEE Conference on Computer Vision and
Pattern …, 2015 |
3</a > | 2015 |
| Sparkle vision: Seeing the world through random specular microfacets</a > Z Zhang, P Isola, EH Adelson
arXiv preprint arXiv:1412.7884, 2014
|
4</a > | 2014 |
| Tactile sensor using elastomeric imaging</a >
E Adelson
US Patent App. 14/045,647, 2014
|
1</a > | 2014 |
| Tactile sensor using elastomeric imaging</a >
E Adelson
US Patent App. 14/045,620, 2014
|
2</a > | 2014 |
| Localization and manipulation of small parts using gelsight tactile sensing</a > R Li, R Platt, W Yuan, A Ten Pas, N Roscup, MA Srinivasan, E Adelson
2014 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2014 |
216</a > | 2014 |
| Puffball Part Segmentation: Psychophysical and Statistical Evaluation</a > N Twarog, E Adelson
Journal of Vision 14 (10), 893-893, 2014
|
2014 | |
| Seeing in Shadeworld</a >
E Adelson, P Isola
Journal of Vision 14 (10), 719-719, 2014
|
2014 | |
| Looking against the light: how perception of translucency depends on lighting direction and phase function</a > B Xiao, B Walter, I Gkioukelas, T Zickler, E Adelson, K Bala
Journal of Vision 14 (10), 1316-1316, 2014</span >
|
3</a > | 2014 |
| Accuracy and speed of material categorization in real-world images</a > L Sharan, R Rosenholtz, EH Adelson
Journal of vision 14 (9), 12-12, 2014
|
162</a > | 2014 |
| Tactile sensor using elastomeric imaging</a >
E Adelson
US Patent App. 13/971,456, 2014
|
2</a > | 2014 |
| Methods of and Systems for Three-Dimensional Digital Impression and Visualization of Objects Through an Elastomer</a > J Rohaly, MK Johnson, EH Adelson
US Patent App. 14/056,817, 2014
|
26</a > | 2014 |
| Looking against the light: How perception of translucency depends on lighting direction</a > B Xiao, B Walter, I Gkioulekas, T Zickler, E Adelson, K Bala
Journal of vision 14 (3), 17-17, 2014
|
89</a > | 2014 |
| Crisp boundary detection using pointwise mutual information</a >
P Isola, D Zoran, D Krishnan, EH Adelson
Computer Vision–ECCV 2014: 13th European Conference, Zurich,
Switzerland …, 2014 |
232</a > | 2014 |
| Optimal Gait Design for Systems With Drift on SO (3)</a >
M Travers, H Choset
Dynamic Systems and Control Conference 56130, V002T33A005, 2013</span >
|
2013 | |
| Understanding the role of phase function in translucent appearance</a > I Gkioulekas, B Xiao, S Zhao, EH Adelson, T Zickler, K Bala
ACM Transactions on graphics (TOG) 32 (5), 1-19, 2013</span >
|
91</a > | 2013 |
| Can you see what you feel? Tactile and visual matching of material properties of fabrics</a > B Xiao, X Jia, E Adelson
Journal of Vision 13 (9), 197-197, 2013
|
2</a > | 2013 |
| Recognizing materials using perceptually inspired features</a >
L Sharan, C Liu, R Rosenholtz, EH Adelson
International journal of computer vision 103, 348-371, 2013</span >
|
233</a > | 2013 |
| Lump detection with a gelsight sensor</a >
X Jia, R Li, MA Srinivasan, EH Adelson
2013 World Haptics Conference (WHC), 175-179, 2013</span >
|
28</a > | 2013 |
| Tactile sensor using elastomeric imaging</a >
EH Adelson
US Patent 8,411,140, 2013
|
62</a > | 2013 |
| Sensing and recognizing surface textures using a gelsight sensor</a >
R Li, EH Adelson
Proceedings of the IEEE Conference on Computer Vision and
Pattern …, 2013 |
138</a > | 2013 |
| Playing with puffball: simple scale-invariant inflation for use in vision and graphics</a > NR Twarog, MF Tappen, EH Adelson
Proceedings of the ACM symposium on applied perception, 47-54, 2012</span >
|
20</a > | 2012 |
| A unified approach to estimating shape from images</a >
P Isola, F Cole, B Freeman, F Durand, E Adelson
Journal of Vision 12 (9), 276-276, 2012
|
2012 | |
| Effects of shape and color on the perception of translucency</a >
B Xiao, I Gkioulekas, A Dunn, S Zhao, E Adelson, T Zickler, K Bala
Journal of Vision 12 (9), 948-948, 2012
|
3</a > | 2012 |
| Estimating material by estimating shape</a >
E Adelson, F Cole, P Isola, W Freeman, F Durand
Journal of Vision 12 (9), 946-946, 2012
|
2012 | |
| Shapecollage: Occlusion-aware, example-based shape interpretation</a > F Cole, P Isola, WT Freeman, F Durand, EH Adelson
Computer Vision–ECCV 2012: 12th European Conference on Computer
Vision …, 2012 |
20</a > | 2012 |
| Speed of Material vs. Object Recognition Depends upon Viewing Condition</a > B Xiao, L Sharan, R Rosenholtz, E Adelson
Journal of Vision 11 (15), 19-19, 2011
|
2</a > | 2011 |
| deForm: an interactive malleable surface for capturing 2.5 D arbitrary objects, tools and touch</a > S Follmer, M Johnson, E Adelson, H Ishii
Proceedings of the 24th annual ACM symposium on User interface
software and …, 2011 |
53</a > | 2011 |
| Interpreting line drawings of smooth shapes</a >
F Cole, F Durand, B Freeman, E Adelson
Journal of Vision 11 (11), 47-47, 2011
|
3</a > | 2011 |
| Material recognition is fast, but not superfast</a >
E Adelson, L Sharan, R Rosenholtz
Journal of Vision 11 (11), 402-402, 2011
|
2</a > | 2011 |
| Segmenting 2D Shapes using 3D Inflation</a >
NR Twarog, EH Adelson, MF Tappen
Journal of Vision 11 (11), 851-851, 2011
|
2011 | |
| Microgeometry capture using an elastomeric sensor</a >
MK Johnson, F Cole, A Raj, EH Adelson
ACM Transactions on Graphics (TOG) 30 (4), 1-8, 2011</span >
|
230</a > | 2011 |
| Visualizing and measuring detailed shape and texture with an elastomeric sensor</a > EH Adelson, MK Johnson
Computational Optical Sensing and Imaging, JTuD2, 2011</span >
|
2</a > | 2011 |
| Surface Metrology using an Elastomeric Sensor</a >
MK Johnson, EH Adelson
Applied Industrial Optics: Spectroscopy, Imaging and Metrology,
AITuB4, 2011 |
2011 | |
| Shape estimation in natural illumination</a >
MK Johnson, EH Adelson
CVPR 2011, 2553-2560, 2011
|
171</a > | 2011 |
| A computational model for material recognition</a >
L Sharan, C Liu, R Rosenholtz, E Adelson
Journal of Vision 10 (7), 987-987, 2010
|
2010 | |
| Exploring features in a bayesian framework for material recognition</a > C Liu, L Sharan, EH Adelson, R Rosenholtz
2010 ieee computer society conference on computer vision and
pattern …, 2010 |
319</a > | 2010 |
| Personal photo enhancement using example images.</a >
N Joshi, W Matusik, EH Adelson, DJ Kriegman
ACM Trans. Graph. 29 (2), 12:1-12:15, 2010</span >
|
122</a > | 2010 |
| Shape from Sheen</a >
EH Adelson, A Torralba, RW Fleming
|
1</a > | 2009 |
| Ground truth dataset and baseline evaluations for intrinsic image algorithms</a > R Grosse, MK Johnson, EH Adelson, WT Freeman
2009 IEEE 12th International Conference on Computer Vision,
2335-2342, 2009 |
515</a > | 2009 |
| An interactive” retrographic sensor” for touch, texture, and shape</a > A Raj, MK Johnson, EH Adelson
ACM SIGGRAPH 2009 Emerging Technologies, 1-1, 2009</span >
|
2009 | |
| The effect of color saturation and luminance contrast on color naturalness</a > L Nakano, T Takeuchi, I Motoyoshi, Y Li, E Adelson, S Nishida
Journal of vision 9 (8), 1040-1040, 2009
|
4</a > | 2009 |
| Material perception: What can you see in a brief glance?</a >
L Sharan, R Rosenholtz, E Adelson
Journal of Vision 9 (8), 784-784, 2009
|
360</a > | 2009 |
| Retrographic sensing for the measurement of surface texture and shape</a > MK Johnson, EH Adelson
2009 IEEE Conference on Computer Vision and Pattern Recognition,
1070-1077, 2009 |
331</a > | 2009 |
| The Perception of Surfaces and Materials.</a >
EH Adelson
Color Imaging Conference, 1, 2009
|
2009 | |
| Shape from sheen</a >
RW Fleming, A Torralba, EH Adelson
Three dimensional shape perception. Q. Zaidi,(Ed.) Springer, 2009</span >
|
18</a > | 2009 |
| Personal photo enhancement using prior images</a >
N Joshi, W Matusik, EH Adelson, DJ Kriegman
ACM SIGGRAPH 2008 posters, 1-1, 2008
|
1</a > | 2008 |
| Human-assisted motion annotation</a >
C Liu, WT Freeman, EH Adelson, Y Weiss
2008 IEEE Conference on Computer Vision and Pattern Recognition,
1-8, 2008 |
261</a > | 2008 |
| ScribbleBoost: Adding Classification to Edge‐Aware Interpolation of Local Image and Video Adjustments</a > Y Li, E Adelson, A Agarwala
Computer Graphics Forum 27 (4), 1255-1264, 2008</span >
|
75</a > | 2008 |
| Human-assisted motion annotation for real-world videos</a >
C Liu, E Adelson, W Freeman
Journal of Vision 8 (6), 679-679, 2008
|
2008 | |
| Eye movements for shape and material perception</a >
L Sharan, R Rosenholtz, EH Adelson
Journal of Vision 8 (6), 219-219, 2008
|
9</a > | 2008 |
| Image statistics for 3D shape estimation</a >
R Fleming, Y Li, E Adelson
Journal of Vision 8 (6), 76-76, 2008
|
6</a > | 2008 |
| Do colored highlights look like highlights</a >
S Nishida, I Motoyoshi, L Nakano, Y Li, L Sharan, E Adelson
Journal of Vision 8 (6), 339, 2008
|
26</a > | 2008 |
| Image statistics for surface reflectance perception</a >
L Sharan, Y Li, I Motoyoshi, S Nishida, EH Adelson
JOSA A 25 (4), 846-865, 2008
|
147</a > | 2008 |
| Image mapping using local and global statistics</a >
Y Li, E Adelson
Human Vision and Electronic Imaging XIII 6806, 399-409, 2008</span >
|
9</a > | 2008 |
| Image statistics and surface perception</a >
EH Adelson
Human vision and electronic imaging XIII 6806, 13-21, 2008</span >
|
26</a > | 2008 |
| Image mapping using local and global statistics [6806-38]</a >
Y Li, E Adelson
PROCEEDINGS-SPIE THE INTERNATIONAL SOCIETY FOR OPTICAL ENGINEERING
6806, 6806, 2008 |
2008 | |
| Image statistics and surface perception (Keynote Paper)[6806-01]</a >
EH Adelson
PROCEEDINGS-SPIE THE INTERNATIONAL SOCIETY FOR OPTICAL ENGINEERING
6806, 6806, 2008 |
2008 | |
| Apparent ridges for line drawing</a >
T Judd, F Durand, E Adelson
ACM transactions on graphics (TOG) 26 (3), 19-es, 2007</span >
|
370</a > | 2007 |
| Learning gaussian conditional random fields for low-level vision</a >
MF Tappen, C Liu, EH Adelson, WT Freeman
2007 IEEE Conference on Computer Vision and Pattern Recognition,
1-8, 2007 |
210</a > | 2007 |
| Histogram skewness is useful and easily computed in neural hardware</a > L Sharan, E Adelson, I Motoyoshi, S Nishida
Journal of Vision 7 (9), 966-966, 2007
|
2007 | |
| Imposing both local and global image statistics leads to perceptually improved superresolution</a > Y Li, E Adelson
Journal of Vision 7 (9), 965-965, 2007
|
2007 | |
| Image statistics and the perception of surface qualities</a >
I Motoyoshi, S Nishida, L Sharan, EH Adelson
Nature 447 (7141), 206-209, 2007
|
731</a > | 2007 |
| Where do you draw the lines?</a >
E Adelson, T Judd, F Durand
PERCEPTION 36, 104-104, 2007
|
2007 | |
| Non-oriented filters are better than oriented filters for skewness detection</a > L Sharan, EH Adelson, I Motoyoshi, S Nishida
Perception 36 (6a), 206-209, 2007
|
4</a > | 2007 |
| Estimating intrinsic component images using non-linear regression</a > MF Tappen, EH Adelson, WT Freeman
2006 IEEE Computer Society Conference on Computer Vision and
Pattern …, 2006 |
134</a > | 2006 |
| Learning the statistics of illumination and reflectance</a >
EH Adelson, MF Tappen, WT Freeman, Y Li
Journal of Vision 6 (6), 102-102, 2006
|
2006 | |
| Image statistics for surface reflectance estimation</a >
L Sharan, Y Li, EH Adelson
Journal of Vision 6 (6), 101-101, 2006
|
2</a > | 2006 |
| Analysis of contour motions</a >
C Liu, W Freeman, E Adelson
Advances in Neural Information Processing Systems 19, 2006</span >
|
45</a > | 2006 |
| Image statistics as a determinant of reflectance perception</a >
I Motoyoshi, S Nishida, EH Adelson
Journal of Vision 5 (8), 569-569, 2005
|
5</a > | 2005 |
| Image statistics and reflectance estimation</a >
L Sharan, Y Li, EH Adelson
Journal of Vision 5 (8), 375-375, 2005
|
5</a > | 2005 |
| Perceptually based range compression for high dynamic range images</a > Y Li, L Sharan, EH Adelson
Journal of Vision 5 (8), 598-598, 2005
|
11</a > | 2005 |
| Luminance re-mapping for the control of apparent material</a >
I Motoyoshi, S Nishida, EH Adelson
Proceedings of the 2nd symposium on Applied perception in graphics
and …, 2005 |
18</a > | 2005 |
| Motion magnification</a >
C Liu, A Torralba, WT Freeman, F Durand, EH Adelson
ACM transactions on graphics (TOG) 24 (3), 519-526, 2005</span >
|
496</a > | 2005 |
| Compressing and companding high dynamic range images with subband architectures</a > Y Li, L Sharan, EH Adelson
ACM transactions on graphics (TOG) 24 (3), 836-844, 2005</span >
|
368</a > | 2005 |
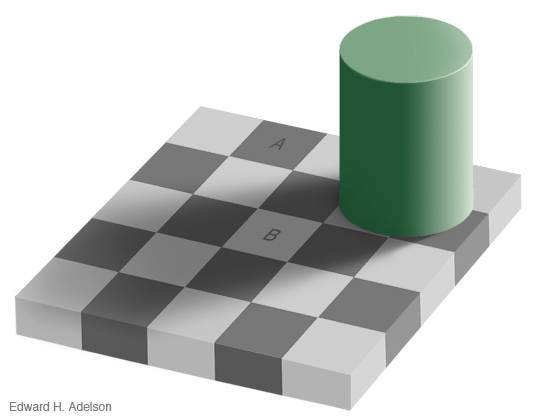
| Checkershadow illusion. 1995</a >
EH Adelson
URL http://web. mit.
edu/persci/people/adelson/checkershadow_illusion. html, 2005</span > |
21</a > | 2005 |
| Material Perception</a >
EH Adelson, L Sharan, Y Li
CSAIL Research Abstract, 2005
|
1</a > | 2005 |
| Adaptation to skewed image statistics alters the perception of glossiness and lightness</a > I Motoyoshi, S Nishida, EH Adelson
PERCEPTION 34, 24-24, 2005
|
6</a > | 2005 |
| Straightness as a cue for luminance edge interpretation</a >
AD Logvinenko, EH Adelson, DA Ross, D Somers
Perception & Psychophysics 67 (1), 120-128, 2005</span >
|
19</a > | 2005 |
| Motion perception and mid-level vision</a >
J McDermott, EH Adelson
The cognitive neurosciences III, 369-383, 2004</span >
|
8</a > | 2004 |
| The geometry of the occluding contour and its effect on motion interpretation</a > J McDermott, EH Adelson
Journal of Vision 4 (10), 9-9, 2004
|
38</a > | 2004 |
| Statistical characterization of real-world illumination</a >
RO Dror, AS Willsky, EH Adelson
Journal of Vision 4 (9), 11-11, 2004
|
170</a > | 2004 |
| Specular reflections and the perception of shape</a >
RW Fleming, A Torralba, EH Adelson
Journal of vision 4 (9), 10-10, 2004
|
369</a > | 2004 |
| Junctions and cost functions in motion interpretation</a >
J McDermott, EH Adelson
Journal of Vision 4 (7), 3-3, 2004
|
19</a > | 2004 |
| Image statistics for material perception</a >
EH Adelson, Y Li, L Sharan
Journal of Vision 4 (8), 123-123, 2004
|
7</a > | 2004 |
| 9.35 Sensation and Perception, Spring 2004</a >
EH Adelson
|
2004 | |
| Genericity and junctions in motion interpretation</a >
J McDermott, EH Adelson
Journal of Vision 3 (9), 480, 2003
|
2003 | |
| Textural statistics and surface perception.</a >
EH Adelson
Journal of Vision 3 (9), 48-48, 2003
|
3</a > | 2003 |
| How image statistics drive shape-from-texture and shape-from-specularity</a > RW Fleming, A Torralba, RO Dror, EH Adelson
Journal of Vision 3 (9), 73-73, 2003
|
7</a > | 2003 |
| Real-world illumination and the perception of surface reflectance properties</a > RW Fleming, RO Dror, EH Adelson
Journal of vision 3 (5), 3-3, 2003
|
524</a > | 2003 |
| Energy versus synchrony in perceptual grouping</a >
H Farid, EH Adelson
Journal of Vision 2 (7), 703-703, 2002
|
2002 | |
| Motion illusions as optimal percepts</a >
Y Weiss, EP Simoncelli, EH Adelson
Nature neuroscience 5 (6), 598-604, 2002
|
1303</a > | 2002 |
| Recovering shading and reflectance from a single image</a >
MF Tappen
Massachusetts Institute of Technology, 2002</span >
|
8</a > | 2002 |
| Recovering intrinsic images from a single image</a >
M Tappen, W Freeman, E Adelson
Advances in neural information processing systems 15, 2002</span >
|
617</a > | 2002 |
| Statistics of real-world illumination</a >
RO Dror, TK Leung, EH Adelson, AS Willsky
Proceedings of the 2001 IEEE Computer Society Conference on Computer
Vision …, 2001 |
72</a > | 2001 |
| Surface reflectance estimation under unknown natural illumination</a > RW Fleming, RO Dror, EH Adelson
Journal of Vision 1 (3), 43-43, 2001
|
4</a > | 2001 |
| Straightness, structure, and shadows</a >
E Adelson, D Somers
Journal of Vision 1 (3), 204-204, 2001
|
4</a > | 2001 |
| How do humans determine reflectance properties under unknown illumination?</a > RW Fleming, RO Dror, EH Adelson
|
38</a > | 2001 |
| Recognition of surface reflectance properties from a single image under unknown real-world illumination</a > RO Dror, EH Adelson, AS Willsky
|
77</a > | 2001 |
| Surface reflectance estimation and natural illumination statistics</a > RO Dror, EH Adelson, AS Willsky
|
28</a > | 2001 |
| Synchrony does not promote grouping in temporally structured displays</a > H Farid, EH Adelson
Nature Neuroscience 4 (9), 875-876, 2001
|
53</a > | 2001 |
| Beyond junctions: nonlocal form constraints on motion interpretation</a > J McDermott, Y Weiss, EH Adelson
Perception 30 (8), 905-923, 2001
|
91</a > | 2001 |
| Estimating surface reflectance properties from images under unknown illumination</a > RO Dror, EH Adelson, AS Willsky
Human Vision and Electronic Imaging VI 4299, 231-242, 2001</span >
|
48</a > | 2001 |
| On seeing stuff: the perception of materials by humans and machines</a > EH Adelson
Human vision and electronic imaging VI 4299, 1-12, 2001</span >
|
410</a > | 2001 |
| Genericity, not junctions: Insights from moving crosses</a >
J McDermott, EH Adelson, Y Weiss
PERCEPTION 30, 101-101, 2001
|
2001 | |
| Using image statistics in material perception</a >
EH Adelson, R Fleming, R Dror
PERCEPTION 30, 96-96, 2001
|
2001 | |
| Adventures with gelatinous ellipses—constraints on models of human motion analysis</a > Y Weiss, EH Adelson
Perception 29 (5), 543-566, 2000
|
50</a > | 2000 |
| Standard mechanisms can explain grouping in temporally synchronous displays</a > H Farid, EH Adelson
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 41 (4),
S438-S438, 2000 |
2</a > | 2000 |
| The computation of occlusion for motion perception</a >
J McDermott, Y Weiss, EH Adelson
Investigative Ophthalmology & Visual Science 41 (4),
S544-S544, 2000 |
1</a > | 2000 |
| Temporal dynamics reveal multiple mechanisms of brightness perception.</a > DC Somers, KR Nichols, EH Adelson
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 41 (4),
S956-S956, 2000 |
1</a > | 2000 |
| Buttons, bevels, and shadows.</a >
EH Adelson
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 41 (4),
S741-S741, 2000 |
2000 | |
| Lightness perceptions and lightness illusions. The new cognitive sciences, M. Gazzaniga</a > EH Adelson
MIT Press, 2000
|
9</a > | 2000 |
| Lightness perception and lightness illusions. The new cognitive neurosciences</a > EH Adelson
Cambridge, MA: MIT Press, 2000
|
36</a > | 2000 |
| The new cognitive neurosciences</a >
EH Adelson, M Gazzaniga
Lightness perception and lightness illusions, 339-351, 2000</span >
|
78</a > | 2000 |
| Shadows are fuzzy and straight; paint is sharp and crooked</a >
EH Adelson, D Somers
Perception 29, 46-46, 2000
|
5</a > | 2000 |
| Filtering reveals form in temporally structured displays</a >
EH Adelson, H Farid
Science 286 (5448), 2231-2231, 1999
|
32</a > | 1999 |
| Separating reflections from images by use of independent component analysis</a > H Farid, EH Adelson
JOSA A 16 (9), 2136-2145, 1999
|
200</a > | 1999 |
| Separating reflections and lighting using independent components analysis</a > H Farid, EH Adelson
Proceedings. 1999 IEEE Computer Society Conference on Computer
Vision and …, 1999 |
196</a > | 1999 |
| Amodal completion and depth segregation in motion integration</a >
J McDermott, Y Weiss, EH Adelson
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 40 (4),
S390-S390, 1999 |
1999 | |
| Analyzing junctions with atmospheric transfer functions</a >
EH Adelson
Investigative Ophthalmology & Visual Science 40 (4),
S987-S987, 1999 |
1</a > | 1999 |
| TECHNICAL COMMENTS-Filtering Reveals Form in Temporally Structured Displays</a > EH Adelson, H Farid
Science-International Edition-AAAS 286 (5448), 2361, 1999</span >
|
1999 | |
| Image Processing-Separating reflections from images by use of independent component analysis</a > H Farid, EH Adelson
Journal of the Optical Society of America-A-Optics Image Science and
Vision …, 1999 |
1999 | |
| Articulation and scene statistics</a >
EH Adelson
Perception 28, 17-17, 1999
|
1</a > | 1999 |
| The computation of occlusion for motion perception</a >
J McDermott, Y Weiss, EH Adelson
PERCEPTION 28, 80-80, 1999
|
1</a > | 1999 |
| Method and apparatus for enhancing images using helper signals</a >
B Girod, EH Adelson
US Patent 5,818,972, 1998
|
20</a > | 1998 |
| Subband texture synthesis for image coding</a >
SY Yoon, EH Adelson
Human Vision and Electronic Imaging III 3299, 489-497, 1998</span >
|
16</a > | 1998 |
| Slow and smooth: A Bayesian theory for the combination of local motion signals in human vision</a > Y Weiss, EH Adelson
|
162</a > | 1998 |
| Layered representation for image coding</a >
EH Adelson
US Patent 5,706,417, 1998
|
110</a > | 1998 |
| What makes a good T junction?</a >
J McDermott, Y Weiss, EH Adelson
Perception 27, 40-41, 1998
|
1</a > | 1998 |
| Atmospheric boundaries in lightness perception</a >
EH Adelson, DC Somers
Perception 26 (1_suppl), 60-60, 1997
|
2</a > | 1997 |
| Doggone Dalmatian!</a >
P Sinha, E Adelson
Perception 26 (5), 667-667, 1997
|
1</a > | 1997 |
| Surface perception and motion integration</a >
J McDermott, Y Weiss, EH Adelson
Investigative Ophthalmology & Visual Science 38 (4),
1108-1108, 1997 |
5</a > | 1997 |
| Junctions, transparency, and brightness</a >
DC Somers, EH Adelson
Investigative Ophthalmology & Visual Science 38 (4),
2126-2126, 1997 |
17</a > | 1997 |
| Vector averaging as Bayesian IOC</a >
Y Weiss, EH Adelson
Investigative Ophthalmology & Visual Science 38 (4),
4358-4358, 1997 |
3</a > | 1997 |
| Noise removal via Bayesian wavelet coring</a >
EP Simoncelli, EH Adelson
Proceedings of 3rd IEEE International Conference on Image Processing
1, 379-382, 1996 |
991</a > | 1996 |
| System for encoding image data into multiple layers representing regions of coherent motion and associated motion parameters</a > JYA Wang, EH Adelson
US Patent 5,557,684, 1996
|
268</a > | 1996 |
| The perception of shading and reflectance</a >
EH Adelson, AP Pentland
Perception as Bayesian inference 409, 423, 1996</span >
|
306</a > | 1996 |
| Layers and alpha maps as visual representations</a >
EH Adelson, JYA Wang
Perception 25 (1_suppl), 5-5, 1996
|
1</a > | 1996 |
| Interaction of Multiple Surface Cues in Motion Grouping</a >
Y Weiss, EH Adelson
Perception 25 (1_suppl), 178-178, 1996
|
1</a > | 1996 |
| A unified mixture framework for motion segmentation: Incorporating spatial coherence and estimating the number of models</a > Y Weiss, EH Adelson
Proceedings CVPR IEEE Computer Society Conference on Computer Vision
and …, 1996 |
378</a > | 1996 |
| Noise reduction system</a >
EH Adelson, WT Freeman
US Patent 5,526,446, 1996
|
163</a > | 1996 |
| Layers, warps, and alpha maps in mid-level vision</a >
EH Adelson, JYA Wang
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 37 (3),
2122-2122, 1996 |
1</a > | 1996 |
| Integration and segmentation of non-rigid motion: a computational model</a > Y Weiss, EH Adelson
Investigative Ophthalmology & Visual Science 37 (3),
3395-3395, 1996 |
1</a > | 1996 |
| Motion estimation and segmentation using a recurrent mixture of experts architecture</a > Y Weiss, EH Adelson
Proceedings of 1995 IEEE Workshop on Neural Networks for Signal
Processing …, 1995 |
18</a > | 1995 |
| Layered representations for vision and video</a >
EH Adelson
Proceedings IEEE Workshop on Representation of Visual Scenes (In
Conjunction …, 1995 |
46</a > | 1995 |
| Integration and segmentation of nonrigid motion</a >
Y Weiss, EH Adelson
Investigative Ophthalmology & Visual Science 36 (4),
S228-S228, 1995 |
2</a > | 1995 |
| The analysis of moving visual patterns 1986. In Pattern Recognition Mechanisms, edited by C. Chagas, R. Gattass, and C. Gross. New York: Springer-Verlag</a > JA Movshon, EH Adelson, MS Gizzi, WT Newsome
Frontiers in Cognitive Neuroscience, 148, 1995</span >
|
1995 | |
| Checkershadow illusion</a >
EH Adelson
|
137</a > | 1995 |
| Adventures with gelatinous ellipses</a >
Y Weiss, EH Adelson
Perception 24, 31-31, 1995
|
2</a > | 1995 |
| Perceptually organized EM: A framework for motion segmentation that combines information about form and motion</a > Y Weiss, EH Adelson
Media Laboratory, Massachusetts Institute of Technology, 1995</span >
|
81</a > | 1995 |
| Transparent motion perception as detection of unbalanced motion signals. III. Modeling</a > N Qian, RA Andersen, EH Adelson
Journal of Neuroscience 14 (12), 7381-7392, 1994</span >
|
174</a > | 1994 |
| Transparent motion perception as detection of unbalanced motion signals. I. Psychophysics</a > N Qian, RA Andersen, EH Adelson
Journal of Neuroscience 14 (12), 7357-7366, 1994</span >
|
371</a > | 1994 |
| Mid-level vision: New directions in vision and video</a >
EH Adelson, JYA Wang, SA Niyogi
Proceedings of 1st International Conference on Image Processing 2,
21-25, 1994 |
11</a > | 1994 |
| Analyzing gait with spatiotemporal surfaces</a >
SA Niyogi, EH Adelson
Proceedings of 1994 IEEE Workshop on Motion of Non-rigid and
Articulated …, 1994 |
234</a > | 1994 |
| Representing moving images with layers</a >
JYA Wang, EH Adelson
IEEE transactions on image processing 3 (5), 625-638, 1994</span >
|
1703</a > | 1994 |
| Analyzing and recognizing walking figures in XYT</a >
Niyogi, Adelson
1994 Proceedings of IEEE Conference on Computer Vision and
Pattern …, 1994 |
948</a > | 1994 |
| Applying mid-level vision techniques for video data compression and manipulation</a > J Wang, EH Adelson
Digital Video Compression on Personal Computers: Algorithms and
Technologies …, 1994 |
44</a > | 1994 |
| Spatio-temporal segmentation of video data</a >
J Wang, EH Adelson
Image and Video Processing II 2182, 120-131, 1994</span >
|
160</a > | 1994 |
| Remote influences on brightness illusions</a >
EH Adelson
Investigative Ophthalmology & Visual Science 35 (4),
1490-1490, 1994 |
3</a > | 1994 |
| Applying mid-level vision techniques for video data compression and manipulation [2187-11]</a > JYA Wang, EH Adelson
PROCEEDINGS-SPIE THE INTERNATIONAL SOCIETY FOR OPTICAL ENGINEERING,
116-116, 1994 |
1994 | |
| Spatio-temporal segmentation of video data [2182-12]</a >
JYA Wang, EH Adelson
PROCEEDINGS-SPIE THE INTERNATIONAL SOCIETY FOR OPTICAL ENGINEERING,
120-120, 1994 |
1994 | |
| Perceptual organization and the judgment of brightness</a >
EH Adelson
Science 262 (5142), 2042-2044, 1993
|
748</a > | 1993 |
| Lightness, transparency, and midlevel vision</a >
EH Adelson
OSA Annual Meeting, WJJ. 1, 1993
|
1993 | |
| Layered representation for motion analysis</a >
JYA Wang, EH Adelson
Proceedings of IEEE Conference on Computer Vision and Pattern
Recognition …, 1993 |
441</a > | 1993 |
| Verifying the’consistency’of shading patterns and 3-D structures</a >
P Sinha, E Adelson
[1993] Proceedings IEEE Workshop on Qualitative Vision, 71-80, 1993</span >
|
6</a > | 1993 |
| Recovering reflectance and illumination in a world of painted polyhedra</a > P Sinha, E Adelson
1993 (4th) International Conference on Computer Vision, 156-163, 1993</span >
|
150</a > | 1993 |
| Layered representation for image sequence coding</a >
JYA Wang, EH Adelson
1993 IEEE International Conference on Acoustics, Speech, and
Signal …, 1993 |
29</a > | 1993 |
| Optimal brightness patterns for 2-D optical flow</a >
EH Adelson, JL Prince
Acoustics, Speech, and Signal Processing, IEEE International
Conference on 5 …, 1993 |
1993 | |
| A computational model for the integration of form and motion</a >
GT CHOU, EH ADELSON
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 34 (4),
1029-1029, 1993 |
1</a > | 1993 |
| Recovering 3D shapes from 2D line-drawings</a >
P Sinha, E Adelson
Intelligent Robotics; Proceedings of the International Symposium
on …, 1993 |
4</a > | 1993 |
| Motion, orientation, and early vision</a >
EH Adelson
Spatial Vision 7 (1), 88-88, 1993
|
1</a > | 1993 |
| Single-eye range estimation by using displaced apertures with color filters</a > Y Amari, EH Adelson
Proceedings of the 1992 International Conference on Industrial
Electronics …, 1992 |
26</a > | 1992 |
| Vision with equiluminant colour contrast: 2. A large-scale technique and observations</a > P Cavanagh, EH Adelson, P Heard
Perception 21 (2), 219-226, 1992
|
34</a > | 1992 |
| EXPLORING THE ARGYLE ILLUSION</a >
EH ADELSON
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 33 (4),
1259-1259, 1992 |
1992 | |
| THE RECOVERY OF 3-D SHAPES FROM 2-D WIREFRAME DRAWINGS</a >
P Sinha, EH Adelson
Investigative Ophthalmology & Visual Science 33 (4),
825-825, 1992 |
10</a > | 1992 |
| Probabilistic contour analysis in a hypercolumn representation</a >
WT Freeman, EH Adelson
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 33 (4),
825-825, 1992 |
1</a > | 1992 |
| Shiftable multiscale transforms</a >
EP Simoncelli, WT Freeman, EH Adelson, DJ Heeger
IEEE transactions on Information Theory 38 (2), 587-607, 1992</span >
|
2070</a > | 1992 |
| Directionally selective complex cells and the computation of motion energy in cat visual cortex</a > RC Emerson, JR Bergen, EH Adelson
Vision research 32 (2), 203-218, 1992
|
374</a > | 1992 |
| Single lens stereo with a plenoptic camera</a >
EH Adelson, JYA Wang
IEEE transactions on pattern analysis and machine intelligence 14
(2), 99-106, 1992 |
1509</a > | 1992 |
| A Model of Transparent Motion Perception Using Layers</a >
T DARREL
Investigative Opthalmology and Visual Science Supplement (ARVO 1992)
33, 1142, 1992 |
1</a > | 1992 |
| A computational model for perception of two-dimensional pattern velocities</a > EP Simoncelli, DJ Heeger, EH Adelson
Investigative Opthalmology and Visual Science Supplement 33,
1142, 1992 |
11</a > | 1992 |
| Optical ranging apparatus</a >
EH Adelson
US Patent 5,076,687, 1991
|
230</a > | 1991 |
| Layered representations for image coding</a >
EH Adelson
Vision and Modeling Group, Media Laboratory, Massachusetts Institute
of …, 1991 |
71</a > | 1991 |
| Steerable pyramids for image decomposition and enhancement</a >
WT Freeman, EH Adelson
OSA Annual Meeting, WV5, 1991
|
1991 | |
| The plenoptic function and the elements of early vision</a >
EH Adelson, JR Bergen
Computational models of visual processing 1 (2), 3-20, 1991</span >
|
2607</a > | 1991 |
| H., and William T</a >
E Adelson
Freeman,” The Design and Use of Steerable Filters,” IEEE T-PAMI 13,
891-906, 1991 |
2</a > | 1991 |
| The design and use of steerable filters</a >
WT Freeman, EH Adelson
IEEE Transactions on Pattern analysis and machine intelligence 13
(9), 891-906, 1991 |
4616</a > | 1991 |
| Mechanisms for motion perception</a >
E Adelson
Optics and Photonics News 2 (8), 24-30, 1991</span >
|
36</a > | 1991 |
| Motion without movement</a >
WT Freeman, EH Adelson, DJ Heeger
ACM Siggraph Computer Graphics 25 (4), 27-30, 1991</span >
|
201</a > | 1991 |
| Probability distributions of optical flow.</a >
EP Simoncelli, EH Adelson, DJ Heeger
CVPR 91, 310-315, 1991
|
593</a > | 1991 |
| Probability distributions of optical flow</a >
EH Adelson, EP Simoncelli, DJ Heeger
IEEE Conf. Comput. Vision and Pattern Recognition, 310315, 1991</span >
|
9</a > | 1991 |
| Pyramids and multiscale representations</a >
EH Adelson, EP Simoncelli, WT Freeman
Representations and Vision, Gorea A.,(Ed.). Cambridge University
Press …, 1991 |
45</a > | 1991 |
| Receiver-compatible enhanced definition television system</a >
WF Schreiber, AB Lippman, EH Adelson, AN Netravali
US Patent 5,010,405, 1991
|
223</a > | 1991 |
| Extended definition television systems</a >
AB Lippman, EH Adelson, WJ Butera
US Patent 5,003,377, 1991
|
5</a > | 1991 |
| Junction detection and classification</a >
WT Freeman, EH Adelson
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 32 (4),
1279-1279, 1991 |
8</a > | 1991 |
| RELATIONSHIP BETWEEN GRADIENT, SPATIOTEMPORAL ENERGY, AND REGRESSION-MODELS FOR MOTION PERCEPTION</a > EP Simoncelli, EH Adelson
Investigative Ophthalmology & Visual Science 32 (4),
893-893, 1991 |
13</a > | 1991 |
| A DIFFERENT AFTEREFFECT OF MOTION-ALTERING PERCEIVED DIRECTION OF GRATINGS AND PLAIDS</a > ACO LEW, EY Song, SR FRIEDMANHILL, EH Adelson, JM Wolfe
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 32 (4),
827-827, 1991 |
2</a > | 1991 |
| ELEMENTARY MEASUREMENTS IN VISION</a >
EH ADELSON, JR BERGEN
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 32 (4),
1024-1024, 1991 |
1991 | |
| Computing optical flow distributions using spatio-temporal filters</a > EP Simoncelli, EH Adelson
Vision and Modeling Group, Media Laboratory, Massachusetts Institute
of …, 1991 |
36</a > | 1991 |
| The plenoptic function and the elements of early vision. Computational Models of Visual Processing</a > EH Adelson, JR Bergen
Int. J. Comput. Vis 20, 1991
|
71</a > | 1991 |
| William T. Freeman Edward H. Adelson y</a >
EH Adelson
|
1991 | |
| Computational models of visual processing</a >
EH Adelson, JR Bergen
MIT Press, Cambridge, Mass, 1991
|
167</a > | 1991 |
| ” The Plenoptic Function and the Elements of Early Vision”, Computational Models of Visual</a > EH ADELSON
Processing, Chap. 1, Edited by M. Landy and JA Movshon, 1991</span >
|
2</a > | 1991 |
| Pyramids for early vision</a >
EH Adelson, E Simoncelli, WT Freeman
Representations of vision, 3-16, 1991
|
3</a > | 1991 |
| A stereoscopic camera employing a single main lens</a >
EH Adelson, JYA Wang
Proceedings. 1991 IEEE Computer Society Conference on Computer
Vision and …, 1991 |
5</a > | 1991 |
| Elements of early vision</a >
EH Adelson
OSA Annual Meeting, ME1, 1990
|
1990 | |
| Extensions of steerable filters</a >
WT Freeman, EH Adelson
OSA Annual Meeting, MT2, 1990
|
1990 | |
| Single-lens stereoscopic camera</a >
JYA Wang, EH Adelson
OSA Annual Meeting, FKK4, 1990
|
1990 | |
| Ordinal aspects of transparent junctions</a >
P Anandan, EH Adelson
OSA Annual Meeting, FDD3, 1990
|
1</a > | 1990 |
| Optical flow distributions: gradient, energy, and regression methods</a > EP Simoncelli, EH Adelson
OSA Annual Meeting, FDD4, 1990
|
2</a > | 1990 |
| System for ascertaining direction of blur in a range-from-defocus camera</a > B Girod, EH Adelson
US Patent 4,965,442, 1990
|
60</a > | 1990 |
| Ordinal characteristics of transparency</a >
EH Adelson, P Anandan
Vision and Modeling Group, Media Laboratory, Massachusetts Institute
of …, 1990 |
168</a > | 1990 |
| Digital signal encoding and decoding apparatus</a >
EH Adelson
US Patent 4,939,515, 1990
|
428</a > | 1990 |
| Non-separable extensions of quadrature mirror filters to multiple dimensions</a > EP Simoncelli, EH Adelson
Proceedings of the IEEE 78 (4), 652-664, 1990</span >
|
196</a > | 1990 |
| Subband image coding with hexagonal quadrature mirror filters</a >
EP Simoncelli, EH Adelson
Picture Coding Symposium, 1990
|
9</a > | 1990 |
| Subband image coding with three-tap pyramids</a >
EH Adelson, EP Simoncelli
Picture Coding Symposium, 1-3, 1990
|
48</a > | 1990 |
| Lightness judgements and perceptual organization</a >
EH Adelson
Investigative Opthalmology and Visual Science Supplement, 1304, 1990</span >
|
6</a > | 1990 |
| Subband transforms</a >
EP Simoncelli, EH Adelson
Subband image coding, 143-192, 1990
|
172</a > | 1990 |
| Pyramids for vision and image processing</a >
EH Adelson
PERCEPTION 19 (4), 325-325, 1990
|
1990 | |
| Steerable filters for early vision, image analysis, and wavelet decomposition</a > WT Freeman, EH Adelson
Proceedings Third International Conference on Computer Vision,
406,407,408 …, 1990 |
98</a > | 1990 |
| The perceptual buildup of three-dimensional structure from motion</a > EC Hildreth, NM Grzywacz, EH Adelson, VK Inada
Perception & Psychophysics 48, 19-36, 1990</span >
|
84</a > | 1990 |
| Bildbehandlingsssystem.</a >
CR Carlson, EH Adelson, CH Anderson
|
1989 | |
| A compatible high-definition television system using the noise-margin method of hiding enhancement information</a > WF Schreiber, EH Adelson, AB Lippman, G Rongshu, P Monta, A Popat,
… SMPTE journal 98 (12), 873-879, 1989
|
17</a > | 1989 |
| Nonseparable QMF pyramids</a >
EP Simoncelli, EH Adelson
Visual Communications and Image Processing IV 1199, 1242-1246, 1989</span >
|
9</a > | 1989 |
| Nonlinear model of cat striate physiology</a >
DJ Heeger, EH Adelson
OSA Annual Meeting, TUT2, 1989
|
6</a > | 1989 |
| Steerable filters for image analysis</a >
WT Freeman, EH Adelson, EP Simoncelli
OSA Annual Meeting, MJJ4, 1989
|
20</a > | 1989 |
| Analyzing shading and reflectance</a >
EH Adelson, AP Pentland
OSA Annual Meeting, MJJ2, 1989
|
1</a > | 1989 |
| Hexagonal qmf pyramids</a >
EH Adelson, EP Simoncelli
Applied Vision, WB2, 1989
|
2</a > | 1989 |
| Steerable filters</a >
WT Freeman, EH Adelson
Image Understanding and Machine Vision, WB2, 1989</span >
|
25</a > | 1989 |
| Truncated subband coding of images</a >
EH Adelson, EPM Simoncelli
US Patent 4,817,182, 1989
|
97</a > | 1989 |
| WHITAKER COLLEGE</a >
CM No, EC Hildreth, NM Grzywacz, EH Adelson, VK Inada
|
1989 | |
| Early vision and texture perception</a >
JR Bergen, EH Adelson
Nature 333 (6171), 363-364, 1988
|
476</a > | 1988 |
| Single-channel backward-compatible EDTV systems</a >
AB Lippmanny, AN Netravali, EH Adelson, WR Neuman, WF Schreiber
Television Technology in Transition: 22nd Annual SMPTE Television
Conference …, 1988 |
10</a > | 1988 |
| Channel-compatible 6-MHz HDTV distribution systems</a >
WF Schreiber, AB Lippman, AN Netravali, EH Adelson, DH Staelin
Television Technology in Transition: 22nd Annual SMPTE Television
Conference …, 1988 |
29</a > | 1988 |
| The temporal integration of 3-D structure from motion: a computational and psychophysical study</a > NM Grzywacz, EC Hildreth, VK Inada, EH Adelson
Organization of neural networks, 239-259, 1988</span >
|
11</a > | 1988 |
| Efficient image coding with QMF pyramids</a >
E Simoncelli, EH Adelson, R Hingorani
OSA Annual Meeting, WL7, 1987
|
1987 | |
| QMF pyramids: a new class of orthogonal pyramid transform</a >
EH Adelson, E Simoncelli
OSA Annual Meeting, WL6, 1987
|
1987 | |
| Visual mechanisms and visual illusions</a >
EH Adelson
OSA Annual Meeting, WB1, 1987
|
1987 | |
| Hierarchical, computationally efficient motion estimation algorithm</a > JR Bergen, EH Adelson
OSA Annual Meeting, MY5, 1987
|
81</a > | 1987 |
| Orthogonal Pyramid Transforms For Image Coding.</a >
EH Adelson, E Simoncelli, R Hingorani
Visual Communications and image processing II 845, 50-58, 1987</span >
|
540</a > | 1987 |
| Method for compensating for void-defects in images</a >
PJ Burt, EH Adelson
US Patent 4,698,843, 1987
|
26</a > | 1987 |
| Depth-of-focus imaging process method</a >
EH Adelson
US Patent 4,661,986, 1987
|
219</a > | 1987 |
| The Laplacian pyramid as a compact image code</a >
PJ Burt, EH Adelson
Readings in computer vision, 671-679, 1987</span >
|
9937</a > | 1987 |
| Visual texture segmentation based on energy measures</a >
JR Bergen, EH Adelson
OSA Annual Meeting, THN7, 1986
|
51</a > | 1986 |
| Experimental brain research supplementum ii: pattern recognition mechanisms</a > JA Movshon, EH Adelson, MS Gizzi, WT Newsome
|
8</a > | 1986 |
| The perceptual buildup of three-dimensional structure from motion</a > VK Inada, EC Hildreth, NM Grzywacz, EH Adelson
Invest. Ophthal. Visual Sci. Suppl 27, 142, 1986</span >
|
7</a > | 1986 |
| The extraction of spatio-temporal energy in human and machine vision</a > EH Adelson
IEEE Workshop on Motion: Representation and analysis, 151-155, 1986</span >
|
217</a > | 1986 |
| Merging images through pattern decomposition</a >
PJ Burt, EH Adelson
Applications of digital image processing VIII 575, 173-181, 1985</span >
|
243</a > | 1985 |
| Manipulating image information with pyramids</a >
EH Adelson, PJ Burt
OSA Annual Meeting, THX2, 1985
|
1985 | |
| Mechanisms for the detection of flicker and motion</a >
JR Bergen, EH Adelson
OSA Annual Meeting, FQ5, 1985
|
1</a > | 1985 |
| Pyramid-based computer graphics</a >
JM Ogden, EH Adelson, JR Bergen, PJ Burt
RCA engineer 30 (5), 4-15, 1985
|
222</a > | 1985 |
| System for coring an image-representing signal</a >
CR Carlson, EH Adelson, CH Anderson
US Patent 4,523,230, 1985
|
89</a > | 1985 |
| Improved system for coring an image-representing signal</a >
CR Carlson, EH Adelson, CH Anderson
|
1</a > | 1985 |
| Spatiotemporal energy models for the perception of motion</a >
EH Adelson, JR Bergen
Josa a 2 (2), 284-299, 1985
|
4599</a > | 1985 |
| The analysis of visual moving patterns</a >
JA Movshon, EH Adelson, MS Gizzi, WT Newsome
Pattern recognition mechanisms, 117-151, 1985</span >
|
60</a > | 1985 |
| Pattern recognition mechanisms</a >
JA Movshon, EH Adelson, MS Gizzi, WT Newsome, C Chagas, R Gattas,
… |
158</a > | 1985 |
| The analysis of moving visual patterns</a >
JA Movshon
Experimental Brain Research, 117-151, 1985</span >
|
1175</a > | 1985 |
| Pyramid methods in image processing</a >
EH Adelson, CH Anderson, JR Bergen, PJ Burt, JM Ogden
RCA engineer 29 (6), 33-41, 1984
|
1783</a > | 1984 |
| 75 Inventor: Jerome M. Shapiro, Philadelphia, Pa.</a >
EH Adelson, E Simoncelli, RH SPIE
Research & Development 28 (2), 1984
|
1984 | |
| Multi-resolution splining using A pyramid image representation</a >
EH Adelson, PJ Burt
Applications of Digital Image Processing VI 432, 204-210, 1984</span >
|
3</a > | 1984 |
| Motion channels based on spatiotemporal energy</a >
E Adelson
Investigative Ophthalmology and Visual Science 25, 1984</span >
|
16</a > | 1984 |
| Chromokinetic effect: a surprising interaction of color, luminance, and motion (A)</a > JR Bergen, EH Adelson
Journal of the Optical Society of America A 1, 1284, 1984</span >
|
1984 | |
| The perception of coherent motion in two-dimensional patterns</a >
EH Adelson, JA Movshon
ACM SIGGRAPH Computer Graphics 18 (1), 23-23, 1984</span >
|
35</a > | 1984 |
| Binocular disparity and the computation of two-dimensional motion (A)</a > EH Adelson, JA Movshon
Journal of the Optical Society of America A 1, 1266, 1984</span >
|
59</a > | 1984 |
| A multiresolution spline with application to image mosaics</a >
PJ Burt, EH Adelson
ACM Transactions on Graphics (TOG) 2 (4), 217-236, 1983</span >
|
1725</a > | 1983 |
| What is iconic storage good for?</a >
EH Adelson
Behavioral and Brain Sciences 6 (1), 11-12, 1983</span >
|
12</a > | 1983 |
| In C. Chagas, R. Gattas, & DG Gross</a >
A Movshon, EH Adelson, MS Gizzi, WT Newsome
Pattern recognition mechanisms, 1983
|
3</a > | 1983 |
| Spatiotemporal energy models for the perception of motion (A)</a >
EH Adelson, JR Bergen
Journal of the Optical Society of America (1917-1983) 73, 1861, 1983</span >
|
11</a > | 1983 |
| Phenomenal coherence of moving visual patterns</a >
EH Adelson, JA Movshon
Nature 300 (5892), 523-525, 1982
|
1447</a > | 1982 |
| Image encoding with the Laplacian pyramid (A)</a >
EH Adelson, PJ Burt
Journal of the Optical Society of America (1917-1983) 72, 1803, 1982</span >
|
3</a > | 1982 |
| Phenomenal coherence of Barbas, H.(1988)</a >
EH Adelson, JA Movshon
Anatomic organization of basoventral and medio, 1982</span >
|
5</a > | 1982 |
| Some new illusions and some old ones analyzed in terms of their Fourier components</a > EH Adelson
Investigative Ophthalmology & Visual Science 22, 144, 1982</span >
|
43</a > | 1982 |
| The delayed rod afterimage</a >
EH Adelson
Vision Research 22 (10), 1313-1328, 1982
|
27</a > | 1982 |
| Saturation and adaptation in the rod system</a >
EH Adelson
Vision research 22 (10), 1299-1312, 1982
|
213</a > | 1982 |
| Nonlinear scale for plotting color-matching functions</a >
EH Adelson
JOSA 71 (2), 201-203, 1981
|
1981 | |
| Image data compression with the Laplacian pyramid</a >
PJ Burt, EH Adelson
Proc. IEEE Conf. Pattern Recognition and Image Processing, 1981</span >
|
3</a > | 1981 |
| Phenomenal coherence of moving gratings (A)</a >
EH Adelson, JA Movshon
Journal of the Optical Society of America (1917-1983) 70, 1605, 1980</span >
|
7</a > | 1980 |
| Bleaches as equivalent backgrounds and equivalent filters (A)</a >
EH Adelson
Journal of the Optical Society of America (1917-1983) 70, 1616, 1980</span >
|
3</a > | 1980 |
| Image data compression with the Laplacian pyramid</a >
EH Adelson, PJ Burt
University of Maryland, 1980
|
96</a > | 1980 |
| The psychophysics of iconic storage.</a >
EH Adelson, J Jonides
Journal of Experimental Psychology: Human Perception and Performance
6 (3), 486, 1980 |
96</a > | 1980 |
| Directional movement selectivity in cortical complex cells</a >
JA Movshon, ET Davis, EH Adelson
Soc. Neurosci. Abs 6, 670, 1980
|
18</a > | 1980 |
| Visual persistence without the rods.</a >
EH Adelson
Perception & Psychophysics, 1979
|
42</a > | 1979 |
| The response of the rod system to bright flashes of light</a >
EH Adelson
University of Michigan, 1979
|
1</a > | 1979 |
| Mathematics of afterimage discrimination (A)</a >
EH Adelson
Journal of the Optical Society of America (1917-1983) 69, 1432, 1979</span >
|
1</a > | 1979 |
| Iconic storage: The role of rods</a >
EH Adelson
Science 201 (4355), 544-546, 1978
|
46</a > | 1978 |
| Decay of rod signals following bright flashes (A)</a >
EH Adelson
Journal of the Optical Society of America (1917-1983) 67, 1427, 1977</span >
|
5</a > | 1977 |
| KEY TO INDEX USE</a >
JB Abshire, N Acquista, J See Reader, EH Adelson, J Agostinelli, …
Transformation 50, 487, 1739
|
1739 | |
| 24 Lightness Perception and Lightness Illusions</a >
EH Adelson
|
738</a > | 24 |
| See, Hear, and Feel: Smart Sensory Fusion for Robotic Manipulation (Supplementary Materials)</a > H Li, Y Zhang, J Zhu, S Wang, MA Lee, H Xu, E Adelson, L Fei-Fei, R
Gao, … |
||
| Swingbot: Learning physical features from in-hand tactile exploration for dynamic swing-up manipulation. In 2020 IEEE</a > C Wang, S Wang, B Romero, F Veiga, E Adelson
RSJ International Conference on Intelligent Robots and Systems
(IROS), 5633-5640, 0 |
5</a > | |
| ” Department of Brain and Cognitive Sciences* Department of Electrical Engineering and Computer Science</a > EH Adelson, JYA Wang, SA Niyogº
|
||
| Newsome. WT (1985). The analysis of moving visual patterns</a >
JA Movshon, EH Adelson, MS Gizzi
Stud)’group on pattern recognition mechanisms, 117-1511, 0</span >
|
7</a > | |
| The Perceptual Buildup of Three-Dimensional Structure</a >
EC Hildreth, NM Grzywacz, EH Adelson, VK Inada
|
||
| On the Appearance of Translucent Edges: Supplementary Material</a >
I Gkioulekas, S Harvard, B Walter, EH Adelson, K Bala, T Zickler
|
||
| The Recognition of Material Properties for Vision and Video Communication MIT2000-02</a > EH Adelson
|
||
| Can you see what you feel? Color and folding properties affect material discrimination of fabrics</a > B Xiao, W Bi, X Jia, H Wei, EH Adelson
|
||
| Research Abstracts-2007</a >
C Liu, WT Freeman, EH Adelson
|
||
| Crisp Boundary Detection Using Pointwise Mutual Information–Supplementary Material</a > P Isola, D Zoran, D Krishnan, EH Adelson
|
||
| ARAI, Y. 531 ARAKI, M. 639 ARASE, M. 521 ARAVENA, JL 189 ARCE, GR 187</a > RS ACHARYA, EH ADELSON, M ADJOUADI, G ADORNI, JK AGGARWAL, …
|
||
| 9.601 J/24.949 J Language Acquisition I, Spring 2002</a >
SL Chorover, S Corkin, PH Schiller, GE Schneider, HS Seung, …
|
||
| The MIT Media Laboratory The MIT Media Laboratory Dept. Elec. Eng. and Comp. Sci. Dept. Brain and Cognitive Sciences Massachusetts Institute of Technology Massachusetts …</a > JYA Wang, EH Adelson
|
||
| Aanjaneya, Mridul</a >
M Abe, KT Abou-Moustafa, GD Abowd, WC Abraham, R Abugharbieh, …
|
||
| MIT Media Lab Vision and Modeling Group Technical Report No. 223 Analyzing and Recognizing Walking Figures in XYT</a > SA Niyogi, EH Adelson
|
||
| AI Memo No. 1141 August, 1989 CBIP Memo No. 20</a >
EC Hildreth, NM Grzywacz, EH Adelson, VK Inada
|
||
| Research Abstracts-2006</a >
L Sharan, Y Li, EH Adelson
|
||
| Acoustic Material Recognition</a >
S Cavaco, EH Adelson
|
||
| Estimating Surface Reflectance from Images</a >
R Dror, EH Adelson
|
||
| Recovering Intrinsic Images with Gaussian Conditional Random Fields</a > MF Tappen, WT Freeman, EH Adelson
|
||
| Lightness Perception and Lightness Illusions (Banquet Talk)</a >
EH Adelson
|
||
| Recovering Intrinsic Images</a >
MF Tappen, WT Freeman, EH Adelson
|
Rosenholtz Publications
| ||
|
StatTexNet: Evaluating the Importance of Statistical Parameters for
Pyramid-Based Texture and Peripheral Vision Models
C Koevesdi, V DuTell, A Harrington, M Hamilton, WT Freeman, …
NeuRIPS 2023 Workshop on Gaze Meets ML, 2023
|
2023 | |
| ||
|
Evaluating Peripheral Vision as an Input Transformation to Understand
Object Detection Model Behavior
A Harrington, V DuTell, M Hamilton, A Tewari, S Stent, WT Freeman, …
NeuRIPS 2023 Workshop on Gaze Meets ML, 2023
|
2023 | |
| ||
|
Does your old clutter measure spark joy?
R Rosenholtz
Journal of Vision 23 (9), 5813-5813, 2023
|
2023 | |
| ||
|
Evaluating Pyramid-Based Image Statistics Using Contrastive Learning
V DuTell, W Freeman, R Rosenholtz
Journal of Vision 23 (9), 5744-5744, 2023
|
2023 | |
| ||
|
Peripheral Vision: A Critical Component of Many Visual Tasks
R Rosenholtz
Oxford Research Encyclopedia of Psychology, 2023
|
2023 | |
| ||
|
Efficient dataflow modeling of peripheral encoding in the human visual
system
R Brown, V Dutell, B Walter, R Rosenholtz, P Shirley, M McGuire, …
ACM Transactions on Applied Perceptions 20 (1), 1-22, 2023
|
6 | 2023 |
| ||
|
Efficient Dataflow Modeling of Peripheral Encoding
R Brown, V Dutell, B Walter, R Rosenholtz, P Shirley, M McGuire, …
Journal of Vision 22 (14), 4378-4378, 2022
|
2022 | |
| ||
|
Exploring the perceptual straightness of adversarially robust and
biologically-inspired visual representations
A Harrington, V DuTell, A Tewari, M Hamilton, S Stent, R Rosenholtz, …
SVRHM 2022 Workshop@ NeurIPS, 2022
|
2022 | |
| ||
|
Peripheral vision in real-world tasks: A systematic review
C Vater, B Wolfe, R Rosenholtz
Psychonomic bulletin & review 29 (5), 1531-1557, 2022
|
29 | 2022 |
| ||
|
Exploring perceptual straightness in learned visual representations
A Harrington, V DuTell, A Tewari, M Hamilton, S Stent, R Rosenholtz, …
The Eleventh International Conference on Learning Representations, 2022
|
1 | 2022 |
| ||
|
Peripheral Vision, Models of
R Rosenholtz, B Wolfe
Encyclopedia of Computational Neuroscience, 2722-2725, 2022
|
2022 | |
| ||
|
Toward a theory of visual information acquisition in driving
B Wolfe, BD Sawyer, R Rosenholtz
Human factors 64 (4), 694-713, 2022
|
45 | 2022 |
| ||
|
Effects of temporal and spatiotemporal cues on detection of dynamic
road hazards
B Wolfe, A Kosovicheva, S Stent, R Rosenholtz
Cognitive research: principles and implications 6, 1-15, 2021
|
7 | 2021 |
| ||
|
” Challenges to pooling models of crowding: Implications for visual
mechanisms”: Correction.
R Rosenholtz, D Yu, S Keshvari
Assn for Research in Vision & Ophthalmology (ARVO), 2021
|
2021 | |
| ||
|
The role of crowding in mental maze solving
Y Semizer, D Yu, R Rosenholtz
Journal of Vision 21 (9), 2896-2896, 2021
|
2021 | |
| ||
|
Attentional Cueing in the World: Temporal and Spatiotemporal Cues for
Road Hazards
B Wolfe, A Kosovicheva, S Stent, R Rosenholtz
Journal of Vision 21 (9), 2218-2218, 2021
|
1 | 2021 |
| ||
|
Corrections to: Challenges to pooling models of crowding
R Rosenholtz, D Yu, S Keshvari
|
2021 | |
| ||
|
Superior parietal lobule: a role in relative localization of multiple
different elements
A Vialatte, Y Yeshurun, AZ Khan, R Rosenholtz, L Pisella
Cerebral Cortex 31 (1), 658-671, 2021
|
8 | 2021 |
| ||
|
The Role of Peripheral Vision and Attention in Change Blindness
ME Smith, D El-Shaarawi, Y Ma, E Wilson, L Salee, R Rosenholtz, …
Journal of Vision 20 (11), 1538-1538, 2020
|
1 | 2020 |
| ||
|
Understanding dynamic scenes: How driving can teach us about scene
perception
B Wolfe, R Rosenholtz
Journal of Vision 20 (11), 145-145, 2020
|
1 | 2020 |
| ||
|
Texture Tiling Model
R Rosenholtz
|
2020 | |
| ||
|
Demystifying visual awareness: Peripheral encoding plus limited
decision complexity resolve the paradox of rich visual experience and
curious perceptual failures
R Rosenholtz
Attention, Perception, & Psychophysics 82 (3), 901-925, 2020
|
23 | 2020 |
| ||
|
Rapid holistic perception and evasion of road hazards.
B Wolfe, B Seppelt, B Mehler, B Reimer, R Rosenholtz
Journal of experimental psychology: general 149 (3), 490, 2020
|
53 | 2020 |
| ||
|
Detection of brake lights while distracted: Separating peripheral
vision from cognitive load
B Wolfe, BD Sawyer, A Kosovicheva, B Reimer, R Rosenholtz
Attention, Perception, & Psychophysics 81, 2798-2813, 2019
|
24 | 2019 |
| ||
|
The occurrence of illusory conjunctions correlates with the spatial
noise in peripheral vision
YA Markov, LG Dulyan, R Rosenholtz, IS Utochkin
Journal of Vision 19 (10), 66a-66a, 2019
|
2019 | |
| ||
|
Perceptual factors in mental maze solving
D Yu, Q Wan, B Balas, R Rosenholtz
Journal of Vision 19 (10), 68b-68b, 2019
|
2019 | |
| ||
|
Why Uber Drivers Scare You: Detecting Road Hazards With Peripheral
Vision
BA Wolfe, R Rosenholtz
Journal of Vision 19 (10), 162c-162c, 2019
|
1 | 2019 |
| ||
|
Challenges to pooling models of crowding: Implications for visual
mechanisms
R Rosenholtz, D Yu, S Keshvari
Journal of vision 19 (7), 15-15, 2019
|
51 | 2019 |
| ||
|
Beyond Bouma’s window: How to explain global aspects of crowding?
A Doerig, A Bornet, R Rosenholtz, G Francis, AM Clarke, MH Herzog
PLoS computational biology 15 (5), e1006580, 2019
|
40 | 2019 |
| ||
|
Modern vision science for designers: Making designs clear at a
glance
R Rosenholtz, D Yu
Extended Abstracts of the 2019 CHI Conference on Human Factors in
Computing …, 2019
|
2 | 2019 |
| ||
|
Predicting road scenes from brief views of driving video
B Wolfe, L Fridman, A Kosovicheva, B Seppelt, B Mehler, B Reimer, …
Journal of vision 19 (5), 8-8, 2019
|
16 | 2019 |
| ||
|
Example outputs of the Texture Tiling Model (” mongrels”)
R Rosenholtz, D Yu, S Keshvari
|
2019 | |
| ||
|
Human Vision at a Glance (Invited Talk)
R Rosenholtz, D Yu
14th International Conference on Spatial Information Theory (COSIT
2019), 2019
|
2019 | |
| ||
|
Web pages: What can you see in a single fixation?
A Jahanian, S Keshvari, R Rosenholtz
Cognitive Research: Principles and Implications 3, 1-15, 2018
|
17 | 2018 |
| ||
|
Context mitigates crowding: Peripheral object recognition in real-world
images
MWA Wijntjes, R Rosenholtz
Cognition 180, 158-164, 2018
|
11 | 2018 |
| ||
|
Similarity effects in peripheral vision: improved representation or
cuing?
D Yu, R Rosenholtz
Journal of Vision 18 (10), 20-20, 2018
|
1 | 2018 |
| ||
|
Was that a moose on the road? Gist-like perception of emerging driving
hazards
B Wolfe, R Rosenholtz
Journal of Vision 18 (10), 383-383, 2018
|
2018 | |
| ||
|
Rethinking capacity limits in visual processing: Peripheral vision,
attention, and decision limits
R Rosenholtz
Journal of Vision 18 (10), 1185-1185, 2018
|
2018 | |
| ||
|
Modeling perceptual grouping in peripheral vision for information
visualization
S Keshvari, D Yu, R Rosenholtz
Journal of Vision 18 (10), 441-441, 2018
|
2018 | |
| ||
|
More than the Useful Field: Considering peripheral vision in driving
B Wolfe, J Dobres, R Rosenholtz, B Reimer
Applied ergonomics 65, 316-325, 2017
|
124 | 2017 |
| ||
|
Perceptual and attentional factors in detection of driving-relevant
visual events
R Rosenholtz, B Wolfe, B Sawyer, A Kosovicheva, B Reimer
Journal of Vision 17 (10), 754-754, 2017
|
2017 | |
| ||
|
Summary statistic encoding plus limits on decision complexity underlie
the richness of visual perception as well as its quirky failures
R Rosenholtz
Journal of Vision 17 (10), 202-202, 2017
|
2017 | |
| ||
|
Seeing the road in the blink of an eye-rapid perception of the driver’s
visual environment
B Wolfe, L Fridman, A Kosovicheva, B Reimer, R Rosenholtz
Journal of Vision 17 (10), 561-561, 2017
|
2017 | |
| ||
|
Evidence for Configural Superiority Effects in Convolutional Neural
Networks
S Keshvari, R Rosenholtz
Journal of Vision 17 (10), 169-169, 2017
|
2017 | |
| ||
|
Perceiving the roadway in the blink of an eye-rapid perception of the
road environment and prediction of events
B Wolfe, L Fridman, A Kosovicheva, B Seppelt, B Mehler, R Rosenholtz,
…
Driving Assessment Conference 9 (2017), 2017
|
5 | 2017 |
| ||
|
Sideeye: A generative neural network based simulator of human
peripheral vision
L Fridman, B Jenik, S Keshvari, B Reimer, C Zetzsche, R Rosenholtz
arXiv preprint arXiv:1706.04568, 2017
|
11 | 2017 |
| ||
|
What modern vision science reveals about the awareness puzzle:
Summary-statistic encoding plus decision limits underlie the richness of
visual perception and its quirky failures
R Rosenholtz
arXiv preprint arXiv:1706.02764, 2017
|
2 | 2017 |
| ||
|
Capacity limits and how the visual system copes with them
R Rosenholtz
Electronic Imaging 29, 8-23, 2017
|
20 | 2017 |
| ||
|
Vision science meets visualization
C Nothelfer, Z Bylinskii, M Elliott, C Xiong, DA Szafir, R Rensink, …
IEEE VIS Workshop, 2017
|
1 | 2017 |
| ||
|
A fast foveated fully convolutional network model for human peripheral
vision
L Fridman, B Jenik, S Keshvari, B Riemer, C Zetzsche, R Rosenholtz
Verlag nicht ermittelbar, 2017
|
4 | 2017 |
| ||
|
Those pernicious items
R Rosenholtz
Behavioral and Brain Sciences 40, 2017
|
4 | 2017 |
| ||
|
Neural Computation of Statistical Image Properties in Peripheral
Vision
C Zetzsche, R Rosenholtz, N Cheema, K Gadzicki, L Fridman
|
2017 | |
| ||
|
Age-related differences in the legibility of degraded text
B Wolfe, J Dobres, A Kosovicheva, R Rosenholtz, B Reimer
Cognitive Research: Principles and Implications 1 (1), 1-13, 2016
|
12 | 2016 |
| ||
|
Capabilities and limitations of peripheral vision
R Rosenholtz
Annual review of vision science 2, 437-457, 2016
|
351 | 2016 |
| ||
|
Reduction in Legibility with Degradation in Older and Younger
Observers
B Wolfe, J Dobres, A Kosovicheva, R Rosenholtz, B Reimer
Journal of Vision 16 (12), 1420-1420, 2016
|
1 | 2016 |
| ||
|
Why don’t we see the gorilla? Looking in the wrong places, attending to
the wrong stuff, or doing the wrong task?
R Rosenholtz, L Sharan, E Park
Journal of Vision 16 (12), 43-43, 2016
|
1 | 2016 |
| ||
|
Pooling of continuous features provides a unifying account of
crowding
S Keshvari, R Rosenholtz
Journal of Vision 16 (3), 39-39, 2016
|
107 | 2016 |
| ||
|
A general account of peripheral encoding also predicts scene perception
performance
KA Ehinger, R Rosenholtz
Journal of Vision 16 (2), 13-13, 2016
|
70 | 2016 |
| ||
|
Search performance is better predicted by tileability than presence of
a unique basic feature
H Chang, R Rosenholtz
|
23 | 2016 |
| ||
|
Bridging text spotting and slam with junction features
HC Wang, C Finn, L Paull, M Kaess, R Rosenholtz, S Teller, J Leonard
2015 IEEE/RSJ International Conference on Intelligent Robots and
Systems …, 2015
|
24 | 2015 |
| ||
|
Why don’t we see the gorilla? Looking in the wrong place, attending to
the wrong objects, or doing the wrong task?
R Rosenholtz, L Sharan, E Park
PERCEPTION 44, 82-83, 2015
|
2015 | |
| ||
|
Cube search, revisited
X Zhang, J Huang, S Yigit-Elliott, R Rosenholtz
Journal of Vision 15 (3), 9-9, 2015
|
70 | 2015 |
| ||
|
Effects of grouping on crowding with informative flankers
S Keshvari, R Rosenholtz
Journal of Vision 14 (10), 212-212, 2014
|
2014 | |
| ||
|
New exploration of classic search tasks
H Chang, R Rosenholtz
Journal of Vision 14 (10), 933-933, 2014
|
33 | 2014 |
| ||
|
Peripheral object recognition with informative natural context
R Rosenholtz, M Wijntjes
Journal of Vision 14 (10), 214-214, 2014
|
32 | 2014 |
| ||
|
If you can see it, you spot it sooner: Peripheral change detection is
correlated with performance onSpot-The-Difference’puzzles
L Sharan, R Rosenholtz
Journal of Vision 14 (10), 615-615, 2014
|
2014 | |
| ||
|
Accuracy and speed of material categorization in real-world images
L Sharan, R Rosenholtz, EH Adelson
Journal of vision 14 (9), 12-12, 2014
|
162 | 2014 |
| ||
|
Texture perception
R Rosenholtz
|
60 | 2014 |
| ||
|
A high-dimensional pooling model accounts for seemingly conflicting
substitution effects in crowding
S Keshvari, R Rosenholtz
Journal of Vision 13 (9), 576-576, 2013
|
3 | 2013 |
| ||
|
The power of pooling in high dimensions
R Rosenholtz
Journal of Vision 13 (9), 627-627, 2013
|
2013 | |
| ||
|
Texture statistics predict human performance on a range of
scene-perception tasks
K Ehinger, R Rosenholtz
Journal of Vision 13 (9), 1042-1042, 2013
|
2013 | |
| ||
|
If you cannot see it, you look at it: Visual conspicuity in real-world
scenes is correlated with fixations
L Sharan, R Rosenholtz
Journal of Vision 13 (9), 923-923, 2013
|
2013 | |
| ||
|
Recognizing materials using perceptually inspired features
L Sharan, C Liu, R Rosenholtz, EH Adelson
International journal of computer vision 103, 348-371, 2013
|
233 | 2013 |
| ||
|
Peripheral object recognition in natural images: Effect of window
size
MW Wijntjes, R Rosenholtz
PERCEPTION 42, 188-188, 2013
|
2013 | |
| ||
|
Modeling Inefficiencies in Visual Search
A Raj, J Huang, R Rosenholtz
Journal of Vision 12 (9), 725-725, 2012
|
2012 | |
| ||
|
An Intuitive Model Framework for Gestalt Grouping Principles
NR Twarog, R Rosenholtz
Journal of Vision 12 (9), 1313-1313, 2012
|
2012 | |
| ||
|
Peripheral representation by summary statistics: An alternative to 3-D
shape and lighting direction as basic features for search
R Rosenholtz, X Zhang, J Huang
Journal of Vision 12 (9), 267-267, 2012
|
2012 | |
| ||
|
A unilateral field advantage in visual search and detection
J Huang, R Rosenholtz
Journal of Vision 12 (9), 724-724, 2012
|
2012 | |
| ||
|
A summary statistic representation in peripheral vision explains visual
search
R Rosenholtz, J Huang, A Raj, BJ Balas, L Ilie
Journal of vision 12 (4), 14-14, 2012
|
274 | 2012 |
| ||
|
Rethinking the role of top-down attention in vision: Effects
attributable to a lossy representation in peripheral vision
R Rosenholtz, J Huang, KA Ehinger
Frontiers in psychology 3, 13, 2012
|
190 | 2012 |
| ||
|
Speed of Material vs. Object Recognition Depends upon Viewing
Condition
B Xiao, L Sharan, R Rosenholtz, E Adelson
Journal of Vision 11 (15), 19-19, 2011
|
2 | 2011 |
| ||
|
Material recognition is fast, but not superfast
E Adelson, L Sharan, R Rosenholtz
Journal of Vision 11 (11), 402-402, 2011
|
2 | 2011 |
| ||
|
Collinearity and Containment Grouping have Different Effects on Object
Substitution Masking
A Raj, R Rosenholtz, B Balas
Journal of Vision 11 (11), 1083-1083, 2011
|
2011 | |
| ||
|
A summary-statistic model of the visual periphery predicts the
difficulty of visual curve tracing
B Balas, A Raj, R Rosenholtz
Journal of Vision 11 (11), 1207-1207, 2011
|
2011 | |
| ||
|
Visual search for arbitrary objects in real scenes
JM Wolfe, GA Alvarez, R Rosenholtz, YI Kuzmova, AM Sherman
Attention, Perception, & Psychophysics 73, 1650-1671, 2011
|
234 | 2011 |
| ||
|
Do predictions of visual perception aid design?
R Rosenholtz, A Dorai, R Freeman
ACM Transactions on Applied Perception (TAP) 8 (2), 1-20, 2011
|
94 | 2011 |
| ||
|
What your visual system sees where you are not looking
R Rosenholtz
Human Vision and Electronic Imaging XVI 7865, 343-356, 2011
|
74 | 2011 |
| ||
|
The visual system as statistician: statistical representation in early
vision
R Rosenholtz, BJ Balas, A Raj, L Nakano, L Ilie
Journal of Vision 10 (7), 23-23, 2010
|
2 | 2010 |
| ||
|
A computational model for material recognition
L Sharan, C Liu, R Rosenholtz, E Adelson
Journal of Vision 10 (7), 987-987, 2010
|
2010 | |
| ||
|
Beyond texture processing: further implications of statistical
representations
B Balas, R Rosenholtz, A Raj
Journal of Vision 10 (7), 28-28, 2010
|
2 | 2010 |
| ||
|
Symposium Summary
R Rosenholtz
Journal of Vision 10 (7), 22-22, 2010
|
2010 | |
| ||
|
An ideal saccadic targeting model acting on pooled summary statistics
predicts visual search performance
R Rosenholtz, L Ilie, BJ Balas
Journal of Vision 10 (7), 1293-1293, 2010
|
1 | 2010 |
| ||
|
What your design looks like to peripheral vision
A Raj, R Rosenholtz
Proceedings of the 7th Symposium on Applied Perception in Graphics
and …, 2010
|
12 | 2010 |
| ||
|
Exploring features in a bayesian framework for material recognition
C Liu, L Sharan, EH Adelson, R Rosenholtz
2010 ieee computer society conference on computer vision and
pattern …, 2010
|
321 | 2010 |
| ||
|
A summary-statistic representation in peripheral vision explains visual
crowding
B Balas, L Nakano, R Rosenholtz
Journal of vision 9 (12), 13-13, 2009
|
403 | 2009 |
| ||
|
Can reduced contour detection performance in the periphery be explained
by larger integration fields?
N Schinkel-Bielefeld, UA Ernst, KR Pawelzik, SD Neitzel, S Mandon, …
BMC Neuroscience 10, 1-2, 2009
|
2009 | |
| ||
|
Texture processing model visualizes perception of Pinna-Gregory
illusion
A Raj, R Rosenholtz, B Balas
Journal of Vision 9 (8), 990-990, 2009
|
2009 | |
| ||
|
A crowded model of visual search
R Rosenholtz, S Chan, B Balas
Journal of Vision 9 (8), 1197-1197, 2009
|
6 | 2009 |
| ||
|
Material perception: What can you see in a brief glance?
L Sharan, R Rosenholtz, E Adelson
Journal of Vision 9 (8), 784-784, 2009
|
362 | 2009 |
| ||
|
An intuitive model of perceptual grouping for HCI design
R Rosenholtz, NR Twarog, N Schinkel-Bielefeld, M Wattenberg
Proceedings of the SIGCHI Conference on Human Factors in Computing
Systems …, 2009
|
45 | 2009 |
| ||
|
Connection structures underlying human contour integration
N Schinkel-Bielefeld, U Ernst, S Mandon, S Neitzel, A Kreiter, K
Pawelzik, …
Journal of Vision 8 (6), 586-586, 2008
|
2008 | |
| ||
|
Eye movements for shape and material perception
L Sharan, R Rosenholtz, EH Adelson
Journal of Vision 8 (6), 219-219, 2008
|
9 | 2008 |
| ||
|
A texture-perception model of crowding for general stimuli, Version
1.0
L Nakano, R Rosenholtz, B Balas
Journal of Vision 8 (6), 433-433, 2008
|
2008 | |
| ||
|
Search for arbitrary objects in natural scenes is remarkably
efficient
J Wolfe, G Alvarez, R Rosenholtz, A Oliva, A Torralba, Y Kuzmova, …
Journal of Vision 8 (6), 1103-1103, 2008
|
9 | 2008 |
| ||
|
Methods and systems for transitioning between thumbnails and documents
based upon thumbnail appearance
R Rosenholtz, AG Woodruff, A Faulring
US Patent 7,337,396, 2008
|
27 | 2008 |
| ||
|
Uniform versus random orientation in fading and filling-in
CH Attar, K Hamburger, R Rosenholtz, H Götzl, L Spillmann
Vision Research 47 (24), 3041-3051, 2007
|
12 | 2007 |
| ||
|
Software for modeling set perception
R Rosenholtz, G Alvarez
|
2007 | |
| ||
|
A computational model for shape from texture
J Malik, R Rosenholtz
Ciba Foundation Symposium 184‐Higher‐Order Processing in the Visual
System …, 2007
|
13 | 2007 |
| ||
|
Feature congestion and subband entropy measures of visual clutter
R Rosenholtz, Y Li, L Nakano
|
6 | 2007 |
| ||
|
Filtering in feature space: A computational model of grouping by
proximity and similarity
R Rosenholtz, N Twarog, M Wattenberg
Journal of Vision 7 (9), 313-313, 2007
|
1 | 2007 |
| ||
|
Visual identifiers for digital data
J Lewis, R Rosenholtz, N Fong, U Neumann
US Patent App. 11/197,840, 2007
|
16 | 2007 |
| ||
|
Three-dimensional active vision with glyph address carpet
J Chen, L Hong, DL Hecht, RE Rosenholtz
US Patent 7,164,789, 2007
|
38 | 2007 |
| ||
|
Measuring visual clutter
R Rosenholtz, Y Li, L Nakano
Journal of vision 7 (2), 17-17, 2007
|
911 | 2007 |
| ||
|
How and why we perceive sets: What does modeling tell us?
R Rosenholtz, G Alvarez
Perception 36, 8-8, 2007
|
3 | 2007 |
| ||
|
Systems and method for automatically choosing visual characteristics to
highlight a target against a background
RE Rosenholtz
US Patent 7,130,461, 2006
|
54 | 2006 |
| ||
|
Methods and systems for generating enhanced thumbnails
RE Rosenholtz, AG Woodruff, AR Faulring
US Patent 7,069,506, 2006
|
69 | 2006 |
| ||
|
Feature congestion: A measure of visual clutter
R Rosenholtz, Y Li, Z Jin, J Mansfield
Journal of Vision 6 (6), 827-827, 2006
|
22 | 2006 |
| ||
|
Methods and systems for document navigation using enhanced
thumbnails
RE Rosenholtz, AG Woodruff, AR Faulring
US Patent 6,993,726, 2006
|
81 | 2006 |
| ||
|
A computational form of the statistical saliency model for visual
search
R Rosenholtz, Z Jin
Journal of Vision 5 (8), 777-777, 2005
|
11 | 2005 |
| ||
|
Methods and systems for generating enhanced thumbnails usable for
document navigation
RE Rosenholtz, AG Woodruff, AR Faulring
US Patent 6,883,138, 2005
|
64 | 2005 |
| ||
|
Feature congestion: a measure of display clutter
R Rosenholtz, Y Li, J Mansfield, Z Jin
Proceedings of the SIGCHI conference on Human factors in computing
systems …, 2005
|
428 | 2005 |
| ||
|
VisualIDs: automatic distinctive icons for desktop interfaces
JP Lewis, R Rosenholtz, N Fong, U Neumann
ACM Transactions on Graphics (TOG) 23 (3), 416-423, 2004
|
69 | 2004 |
| ||
|
Letter search is influenced by the frequency of occurrence of the
letters of the alphabet
R Rosenholtz
Journal of Vision 4 (8), 175-175, 2004
|
2004 | |
| ||
|
Language, Categorization, and Visual Search
JA Winawer, R Rosenholtz, N Witthoft, L Boroditsky
Journal of Vision 4 (8), 693-693, 2004
|
2004 | |
| ||
|
The effect of background color on asymmetries in color search
R Rosenholtz, AL Nagy, NR Bell
Journal of vision 4 (3), 9-9, 2004
|
70 | 2004 |
| ||
|
9.07 Statistical Methods in Brain and Cognitive Science, Spring 2004
R Rosenholtz
|
2004 | |
| ||
|
Search isocontours as a tool for understanding visual search
R Rosenholtz
Journal of Vision 3 (9), 630-630, 2003
|
2003 | |
| ||
|
Halo: a technique for visualizing off-screen objects
P Baudisch, R Rosenholtz
Proceedings of the SIGCHI conference on Human factors in computing
systems …, 2003
|
640 | 2003 |
| ||
|
Dependence of Asymmetries in Color Search on Background Color
AL Nagy, R Rosenholtz
Investigative Ophthalmology & Visual Science 43 (13), 3990-3990, 2002
|
2002 | |
| ||
|
Effects of background color on asymmetries in color search
R Rosenholtz, AL Nagy, N Bell
Journal of Vision 2 (7), 526-526, 2002
|
2002 | |
| ||
|
Popout prism: adding perceptual principles to overview+ detail document
interfaces
B Suh, A Woodruff, R Rosenholtz, A Glass
Proceedings of the SIGCHI conference on Human factors in computing
systems …, 2002
|
93 | 2002 |
| ||
|
A comparison of the use of text summaries, plain thumbnails, and
enhanced thumbnails for Web search tasks
A Woodruff, R Rosenholtz, JB Morrison, A Faulring, P Pirolli
Journal of the American Society for Information Science and Technology
53 (2 …, 2002
|
116 | 2002 |
| ||
|
Visual search for orientation among heterogeneous distractors:
experimental results and implications for signal-detection theory models
of search.
R Rosenholtz
Journal of Experimental Psychology: Human Perception and Performance 27
(4), 985, 2001
|
95 | 2001 |
| ||
|
Search asymmetries? What search asymmetries?
R Rosenholtz
Perception & Psychophysics 63, 476-489, 2001
|
170 | 2001 |
| ||
|
Size does matter in judgements of numerosity.
R Rosenholtz, A Woodruff
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 42 (4), S724-S724, 2001
|
2001 | |
| ||
|
Using thumbnails to search the Web
A Woodruff, A Faulring, R Rosenholtz, J Morrsion, P Pirolli
Proceedings of the SIGCHI conference on Human factors in computing
systems …, 2001
|
294 | 2001 |
| ||
|
Effects of background colour on asymmetries in colour search
RE Rosenholtz, AL Nagy, NR Bell
PERCEPTION 30, 40-40, 2001
|
2001 | |
| ||
|
Effects of element size on judgments of object number and density
RE Rosenholtz, A Woodruff, J Morrison
PERCEPTION 30, 6-6, 2001
|
2001 | |
| ||
|
Significantly different textures: A computational model of
pre-attentive texture segmentation
R Rosenholtz
Computer Vision—ECCV 2000: 6th European Conference on Computer
Vision …, 2000
|
38 | 2000 |
| ||
|
A simple saliency model predicts a number of motion popout phenomena
R Rosenholtz
Vision research 39 (19), 3157-3163, 1999
|
320 | 1999 |
| ||
|
Significantly different textures: a texture segmentation algorithm
R Rosenholtz
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 40 (4), S200-S200, 1999
|
1 | 1999 |
| ||
|
A saliency model for search for motion or colour
R Rosenholtz
PERCEPTION 28, 55-55, 1999
|
1999 | |
| ||
|
Change detection in textured patterns
R Rosenholtz, RA Rensink
PERCEPTION 27, 205-206, 1998
|
1998 | |
| ||
|
General-purpose localization of textured image regions
R Rosenholtz
Advances in neural information processing systems 11, 1998
|
11 | 1998 |
| ||
|
What statistics determine segmentation of orientation-defined
textures?
R Rosenholtz
Perception 26 (1_suppl), 331-331, 1997
|
1 | 1997 |
| ||
|
Surface orientation from texture: Isotropy or homogeneity (or both)?
R Rosenholtz, J Malik
Vision research 37 (16), 2283-2293, 1997
|
108 | 1997 |
| ||
|
Computing local surface orientation and shape from texture for curved
surfaces
J Malik, R Rosenholtz
International journal of computer vision 23 (2), 149-168, 1997
|
302 | 1997 |
| ||
|
Basic signal detection theory model for visual search does not predict
performance with heterogeneous distractors
R Rosenholtz
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 38 (4), 3204-3204, 1997
|
2 | 1997 |
| ||
|
A Rorschach test for visual classification strategies
AB Watson, R Rosenholtz
Investigative Opthalmology and Visual Science 38, S1, 1997
|
19 | 1997 |
| ||
|
Perceptual adaptive JPEG coding
R Rosenholtz, AB Watson
Proceedings of 3rd IEEE International Conference on Image Processing 1,
901-904, 1996
|
101 | 1996 |
| ||
|
Affine structure and photometry
R Rosenholtz, JJ Koenderink
Proceedings CVPR IEEE Computer Society Conference on Computer Vision
and …, 1996
|
16 | 1996 |
| ||
|
Perceptually-Based Adaptive JPEG Coding
AB Watson, R Rosenholtz, CH Null
1996 International Conference on Image Processing, 1996
|
1996 | |
| ||
|
Robust estimation of multiple surface shapes from occluded textures
MJ Black, R Rosenholtz
Proceedings of International Symposium on Computer Vision-ISCV,
485-490, 1995
|
23 | 1995 |
| ||
|
A COMPUTATIONAL MODEL FOR SHAPE FROM TEXTURE FOR MULTIPLE TEXTURES
M BLACK, R ROSENHOLTZ
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 36 (4), S477-S477, 1995
|
1995 | |
| ||
|
TEXTURE IS LIKE MOTION-DEMONSTRATION OF A TEXTURE APERTURE EFFECT AND
TEXTURE TRANSPARENCY
J Malik, R Rosenholtz
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 36 (4), S229-S229, 1995
|
1 | 1995 |
| ||
|
An ideal observer model for shape from texture
R Rosenholtz, J Malik
INVESTIGATIVE OPHTHALMOLOGY & VISUAL SCIENCE 35 (4), 1668-1668, 1994
|
1 | 1994 |
| ||
|
Local shape from texture
RE Rosenholtz
University of California, Berkeley, 1994
|
1994 | |
| ||
|
Recovering surface curvature and orientation from texture distortion: A
least squares algorithm and sensitivity analysis
J Malik, R Rosenholtz
Computer Vision—ECCV’94: Third European Conference on Computer
Vision …, 1994
|
42 | 1994 |
| ||
|
A differential method for computing local shape-from-texture for planar
and curved surfaces
J Malik, R Rosenholtz
Proceedings of IEEE Conference on Computer Vision and Pattern
Recognition …, 1993
|
66 | 1993 |
| ||
|
A differential method for computing local shape-from-texture for
J Malik, R Rosenholtz
University of California at Berkeley, 1993
|
1 | 1993 |
| ||
|
Iterative procedures for reduction of blocking effects in transform
image coding
RE Rosenholtz, A Zakhor
Image Processing Algorithms and Techniques II 1452, 116-126, 1991
|
9 | 1991 |
| ||
|
Perceptually tuned sub-band image coder
RJ Safranek, JD Johnston, RE Rosenholtz
Human Vision and Electronic Imaging: Models, Methods, and Applications
1249 …, 1990
|
35 | 1990 |
| ||
|
Object Detection in Deep Neural Networks Differs from Humans in the
Periphery
A Harrington, V DuTell, M Hamilton, A Tewari, S Stent, WT Freeman, …
|
||
| ||
|
A simple saliency model predicts a number of motion popout
R Rosenholtz
|
||
| ||
|
Perceptual grouping in peripheral vision for information
visualization
S Keshvari, D Yu, R Rosenholtz
|
||
| ||
|
Substitution vs. pooling Late crowding
S Keshvari, R Rosenholtz
|
||
| ||
|
Optimum statistical representation obtained from an intermediate
feature level of the visual hierarchy
N Cheema, L Fridman, R Rosenholtz, C Zetzsche
Submitted for publication, 0
|
1 | |
| ||
|
Neurobiologically realistic model of statistical pooling in peripheral
vision
N Cheema, L Fridman, R Rosenholtz, C Zetzsche
Submitted for publication, 0
|
1 | |
| ||
|
Shape from texture: Isotropy or homogeneity (or both)
R Rosenholtz, J Malik
Vision Research, 0
|
2 | |
| ||
|
A statistical model of peripheral vision predicts the Pinna-Gregory
illusion
A Raj, R Rosenholtz, B Balas
|
||
| ||
|
FastICA
R Rosenholtz, E Simoncelli, G Alvarez, H Gavert, J Hurri, A Hyvarinen,
…
|
||
| ||
|
Feature Congestion and Subband Entropy measures of visual clutter
Y Li, L Nakano, R Rosenholtz
|
||
| ||
|
Human Contour Integration is Optimized for Natural Images
N Schinkel-Bielefeld, U Ernst, K Pawelzik, S Neitzel, S Mandon, A
Kreiter, …
|
||
| ||
|
Shape from Multiple, Transparent, and Occluded Textures
MJ Black, R Rosenholtz
|
||
| ||
|
Software for modeling set perception
G Alvarez, R Rosenholtz
|