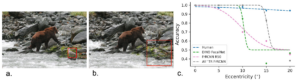
Anne Harrington, Vasha DuTell, and Ruth Rosenholtz, with collaborators in Bill Freeman’s lab and Toyota Research have a new paper on a change detection paradigm to compare human and deep neural network object detection.
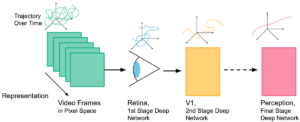
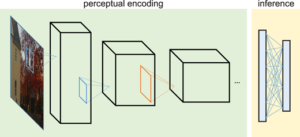
Object Detection in Deep Neural Networks Differs from Humans in the Periphery